Hi,
I’m trying to create a coaxial octocopter for a research project. I’m trying start start out with creating a very simple model to fly in a Gazebo simulation, but I have some problems, since I’m not that experienced with either PX4 or Gazebo. I have managed to load the simple model into Gazebo and have 8 motors that all spins, but as soon as I try to takeoff the drone will flip over. I’m using version 1.13.0 of PX4.
I’m using the following files to try and create the drone, if somebody wants to replicate it. Let me know if anything is missing. Most of them was modified from other code I have found, so any help in improvements in them are appreciated
The mixer file
# Octo coaxial
R: 8c
The geometry file located in init.d-posix being used.
#!/bin/sh
#
# @name Generic 10" Octo coaxial geometry
#
# @type Octorotor Coaxial
# @class Copter
#
# @output MAIN1 motor 1
# @output MAIN2 motor 2
# @output MAIN3 motor 3
# @output MAIN4 motor 4
# @output MAIN5 motor 5
# @output MAIN6 motor 6
# @output MAIN7 motor 7
# @output MAIN8 motor 8
#
# @maintainer Lorenz Meier <lorenz@px4.io>
#
# @board bitcraze_crazyflie exclude
#
. ${R}etc/init.d/rc.mc_defaults
set MIXER octo_cox
set PWM_OUT 12345678
The SDF file being used:
<?xml version='1.0'?>
<sdf version='1.6'>
<model name='octo_cox'>
<!--Drone body -->
<link name='base_link'>
<pose>0 0 0 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>6</mass>
<inertia>
<ixx>0.762625</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.762625</iyy>
<iyz>0</iyz>
<izz>1.369</izz>
</inertia>
</inertial>
<collision name='base_link_inertia_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<box>
<size>0.74 0.74 0.25</size>
</box>
</geometry>
<surface>
<contact>
<ode>
<min_depth>0.001</min_depth>
<max_vel>0</max_vel>
</ode>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='base_link_inertia_visual'>
<pose>0 0 0.125 1.57 0 0</pose>
<geometry>
<mesh>
<scale>0.3 0.3 0.3</scale>
<uri>model://octo_cox/meshes/Part1.dae</uri>
</mesh>
</geometry>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<link name='/imu_link'>
<pose>0 0 0 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.015</mass>
<inertia>
<ixx>1e-05</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>1e-05</iyy>
<iyz>0</iyz>
<izz>1e-05</izz>
</inertia>
</inertial>
</link>
<joint name='/imu_joint' type='revolute'>
<child>/imu_link</child>
<parent>base_link</parent>
<axis>
<xyz>1 0 0</xyz>
<limit>
<lower>0</lower>
<upper>0</upper>
<effort>0</effort>
<velocity>0</velocity>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- Rotor 0 (CCW) -->
<link name='rotor_0'>
<pose>0.520429 -0.435000 0.220 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.05</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_0_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_0_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1.5 1.5 1.5</scale>
<uri>model://sdu_description/meshes/prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/DarkGrey</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_0_joint' type='revolute'>
<child>rotor_0</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- Rotor 1 (CW) -->
<link name='rotor_1'>
<pose>0.550429 0.535000 0.220 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.05</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_1_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_1_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1.5 1.5 1.5</scale>
<uri>model://sdu_description/meshes/prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_1_joint' type='revolute'>
<child>rotor_1</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- Rotor 2 (CCW) -->
<link name='rotor_2'>
<pose>-0.40 0.535000 0.220 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.05</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_2_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_2_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1.5 1.5 1.5</scale>
<uri>model://sdu_description/meshes/prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/DarkGrey</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_2_joint' type='revolute'>
<child>rotor_2</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- Rotor 3 (CW) -->
<link name='rotor_3'>
<pose>-0.350429 -0.405000 0.220 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.05</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_3_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_3_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1.5 1.5 1.5</scale>
<uri>model://sdu_description/meshes/prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_3_joint' type='revolute'>
<child>rotor_3</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- Rotor 4 (CCW) -->
<link name='rotor_4'>
<pose>0.550429 0.535000 0.120 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.05</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_4_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_4_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1.5 1.5 1.5</scale>
<uri>model://sdu_description/meshes/prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/DarkGrey</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_4_joint' type='revolute'>
<child>rotor_4</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- Rotor 5 (CW) -->
<link name='rotor_5'>
<pose>0.520429 -0.435000 0.120 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.05</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_5_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_5_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1.5 1.5 1.5</scale>
<uri>model://sdu_description/meshes/prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_5_joint' type='revolute'>
<child>rotor_5</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- Rotor 6 (CCW) -->
<link name='rotor_6'>
<pose>-0.350429 -0.405000 0.120 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.05</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_6_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_6_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1.5 1.5 1.5</scale>
<uri>model://sdu_description/meshes/prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/DarkGrey</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_6_joint' type='revolute'>
<child>rotor_6</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- Rotor 7 (CW) -->
<link name='rotor_7'>
<pose>-0.40 0.535000 0.120 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.05</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_7_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_7_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1.5 1.5 1.5</scale>
<uri>model://sdu_description/meshes/prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_7_joint' type='revolute'>
<child>rotor_7</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<plugin name='rosbag' filename='libgazebo_multirotor_base_plugin.so'>
<robotNamespace/>
<linkName>base_link</linkName>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='motor_model_0' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_0_joint</jointName>
<linkName>rotor_0</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>0</motorNumber>
<rotorDragCoefficient>0.000806428</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/0</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='motor_model_1' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_1_joint</jointName>
<linkName>rotor_1</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>1</motorNumber>
<rotorDragCoefficient>0.000806428</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/1</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='motor_model_2' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_2_joint</jointName>
<linkName>rotor_2</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>2</motorNumber>
<rotorDragCoefficient>0.000806428</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/2</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='motor_model_3' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_3_joint</jointName>
<linkName>rotor_3</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>3</motorNumber>
<rotorDragCoefficient>0.000806428</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/3</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='motor_model_4' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_4_joint</jointName>
<linkName>rotor_4</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>4</motorNumber>
<rotorDragCoefficient>0.000806428</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/4</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='motor_model_5' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_5_joint</jointName>
<linkName>rotor_5</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>5</motorNumber>
<rotorDragCoefficient>0.000806428</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/5</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='motor_model_6' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_6_joint</jointName>
<linkName>rotor_6</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>6</motorNumber>
<rotorDragCoefficient>0.000806428</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/6</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='motor_model_7' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_7_joint</jointName>
<linkName>rotor_7</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>7</motorNumber>
<rotorDragCoefficient>0.000806428</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/7</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<model name='gps0'>
<link name='link'>
<pose>0 0 0.125 0 -0 0</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.01</mass>
<inertia>
<ixx>2.1733e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>2.1733e-06</iyy>
<iyz>0</iyz>
<izz>1.8e-07</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.01</radius>
<length>0.002</length>
</cylinder>
</geometry>
<material>
<script>
<name>Gazebo/Black</name>
<uri>__default__</uri>
</script>
</material>
</visual>
<sensor name='gps' type='gps'>
<pose>0 0 0 0 -0 0</pose>
<plugin name='gps_plugin' filename='libgazebo_gps_plugin.so'>
<robotNamespace/>
<gpsNoise>1</gpsNoise>
<gpsXYRandomWalk>2.0</gpsXYRandomWalk>
<gpsZRandomWalk>4.0</gpsZRandomWalk>
<gpsXYNoiseDensity>0.0002</gpsXYNoiseDensity>
<gpsZNoiseDensity>0.0004</gpsZNoiseDensity>
<gpsVXYNoiseDensity>0.2</gpsVXYNoiseDensity>
<gpsVZNoiseDensity>0.4</gpsVZNoiseDensity>
</plugin>
</sensor>
</link>
</model>
<joint name='gps0_joint' type='fixed'>
<parent>base_link</parent>
<child>gps0::link</child>
</joint>
<plugin name='groundtruth_plugin' filename='libgazebo_groundtruth_plugin.so'>
<robotNamespace/>
</plugin>
<plugin name='magnetometer_plugin' filename='libgazebo_magnetometer_plugin.so'>
<robotNamespace/>
<pubRate>20</pubRate>
<noiseDensity>0.0004</noiseDensity>
<randomWalk>6.4e-06</randomWalk>
<biasCorrelationTime>600</biasCorrelationTime>
<magTopic>/mag</magTopic>
</plugin>
<plugin name='barometer_plugin' filename='libgazebo_barometer_plugin.so'>
<robotNamespace/>
<pubRate>10</pubRate>
<baroTopic>/baro</baroTopic>
</plugin>
<plugin name='parachute_plugin' filename='libgazebo_parachute_plugin.so'>
<robotNamespace/>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>6</motorNumber>
</plugin>
<plugin name='mavlink_interface' filename='libgazebo_mavlink_interface.so'>
<robotNamespace></robotNamespace>
<imuSubTopic>/imu</imuSubTopic>
<magSubTopic>/mag</magSubTopic>
<baroSubTopic>/baro</baroSubTopic>
<mavlink_addr>INADDR_ANY</mavlink_addr>
<mavlink_udp_port>14560</mavlink_udp_port>
<mavlink_tcp_port>4560</mavlink_tcp_port>
<serialEnabled>false</serialEnabled>
<serialDevice>/dev/ttyACM0</serialDevice>
<baudRate>921600</baudRate>
<qgc_addr>INADDR_ANY</qgc_addr>
<qgc_udp_port>14550</qgc_udp_port>
<sdk_addr>INADDR_ANY</sdk_addr>
<sdk_udp_port>14540</sdk_udp_port>
<hil_mode>0</hil_mode>
<hil_state_level>0</hil_state_level>
<vehicle_is_tailsitter>0</vehicle_is_tailsitter>
<send_vision_estimation>1</send_vision_estimation>
<send_odometry>0</send_odometry>
<enable_lockstep>1</enable_lockstep>
<use_tcp>1</use_tcp>
<motorSpeedCommandPubTopic>/gazebo/command/motor_speed</motorSpeedCommandPubTopic>
<control_channels>
<channel name="rotor0">
<input_index>0</input_index>
<input_offset>0</input_offset>
<input_scaling>1500</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_0_joint</joint_name>
</channel>
<channel name="rotor1">
<input_index>1</input_index>
<input_offset>0</input_offset>
<input_scaling>1500</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_1_joint</joint_name>
</channel>
<channel name="rotor2">
<input_index>2</input_index>
<input_offset>0</input_offset>
<input_scaling>1500</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_2_joint</joint_name>
</channel>
<channel name="rotor3">
<input_index>3</input_index>
<input_offset>0</input_offset>
<input_scaling>1500</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_3_joint</joint_name>
</channel>
<channel name="rotor4">
<input_index>4</input_index>
<input_offset>0</input_offset>
<input_scaling>1500</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_4_joint</joint_name>
</channel>
<channel name="rotor5">
<input_index>5</input_index>
<input_offset>0</input_offset>
<input_scaling>1500</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_5_joint</joint_name>
</channel>
<channel name="rotor6">
<input_index>6</input_index>
<input_offset>0</input_offset>
<input_scaling>1500</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_6_joint</joint_name>
</channel>
<channel name="rotor7">
<input_index>7</input_index>
<input_offset>0</input_offset>
<input_scaling>1500</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_7_joint</joint_name>
</channel>
<channel name='aux1'>
<input_index>8</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
</channel>
</control_channels>
</plugin>
<static>0</static>
<plugin name='gazebo_imu_plugin' filename='libgazebo_imu_plugin.so'>
<robotNamespace></robotNamespace>
<linkName>/imu_link</linkName>
<imuTopic>/imu</imuTopic>
<gyroscopeNoiseDensity>0.0003394</gyroscopeNoiseDensity>
<gyroscopeRandomWalk>3.8785e-05</gyroscopeRandomWalk>
<gyroscopeBiasCorrelationTime>1000.0</gyroscopeBiasCorrelationTime>
<gyroscopeTurnOnBiasSigma>0.0087</gyroscopeTurnOnBiasSigma>
<accelerometerNoiseDensity>0.004</accelerometerNoiseDensity>
<accelerometerRandomWalk>0.006</accelerometerRandomWalk>
<accelerometerBiasCorrelationTime>300.0</accelerometerBiasCorrelationTime>
<accelerometerTurnOnBiasSigma>0.196</accelerometerTurnOnBiasSigma>
</plugin>
</model>
</sdf>
Managed to solve it simply by moving the propellers further away from the center. The reason for this is that the geometry file says the propellers is located 0.7 meters away from the center, so moving the that far out made it fly.
Hi Mr_Madsen, I have questions about what you said "the geometry file says the propellers is located 0.7 meters away from the center’ octo_cox.toml ?? and you modify your Rotor link pose ?? Is it correct?
yes, but later found out that I also had the MAV_type parameter to quad instead of octo, which gave me some problems.
aksuns
March 15, 2023, 7:27am
6
Hello,
Have you encountered this problem while working on your model and if so how you managed to solve it?
Hi,
No, I never got any problems with yaw control, when I created my coaxial simulation. Have you made sure the motors rotate in the correct orientation, similar to how the airframe configuration is setup?
aksuns
March 20, 2023, 7:55am
8
Yeah, I figured the problem was not related to coaxial configuration. Apperently it was a know issue about VTOLs with multi pusher rotors.
1 Like
I am facing the same issue with my simulation. So instead of changing the .sdf file, I created a new custom geometry file named octa_cox_custom.toml and used that in the airframe. But still, I am facing the same issue. Can someone help me? Thanks in advance.
did you find the solution for the same. because i am also getting the same error and i am using xplane 12 as a simulator for my work… i created the geometry file (.toml). but still i am getting the flipping error…
hello, i am also facing yaw issue. any update here??
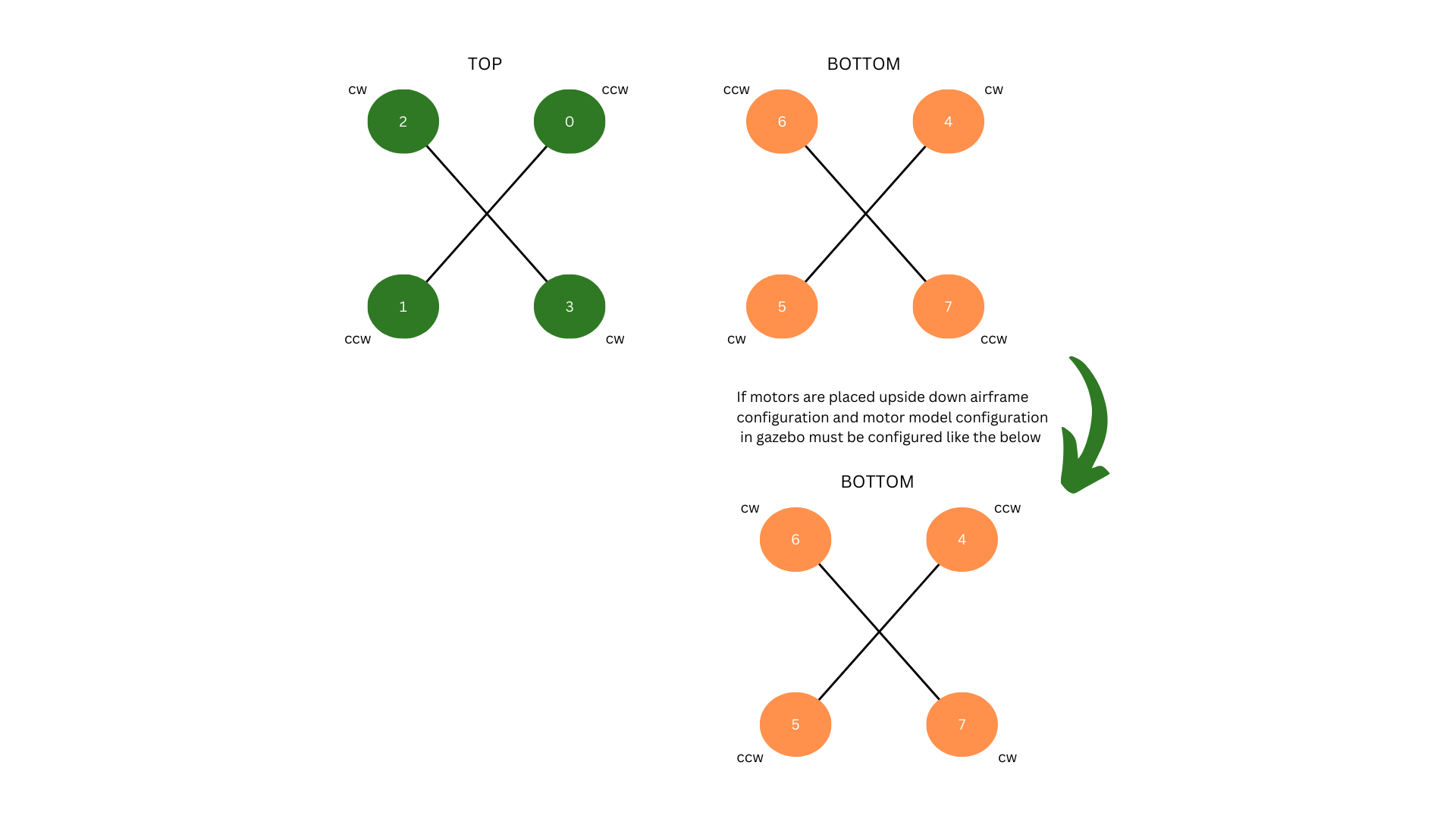
I solved the problem after reconfigure my airframe file.
The issue was about motors spin rotation is not correct for me. I was skipping the 4-5-6-7 th motors were placed upside down.
Another note is: it must be considered that px4 axis is the gazebo axis rotated 90 degrees counterclockwise.
So after reconfiguration here is my output
Hello,
I am currently facing a critical issue while simulating my custom octocopter drone in SITL using PX4 (v1.15) with Gazebo and QGroundControl.
The SDF model appears correctly, all plugins are properly integrated, the motors are present, and the propellers rotate as expected in the simulation. However, as soon as I apply throttle, the drone becomes uncontrollable. It starts behaving erratically, and if a propeller touches the ground, the drone destabilizes completely — it spins or flips uncontrollably.
I suspect the issue may be related to the physical parameters of the model or how ground contact is handled, but I am currently stuck and unsure how to proceed.
To assist in troubleshooting, I will share below:
My SDF file
The custom airframe configuration used in PX4
SDF file
<!-- ############################# -->
<!-- ##### Link: Corps_CAP ##### -->
<!-- ############################# -->
<link name="Corps_CAP">
<pose>0 0 0 0 0 0</pose>
<inertial>
<pose>0.004437 0 0.29689 0 0 0</pose>
<mass>10</mass>
<inertia>
<ixx>3.421e-1</ixx>
<ixy>-1.636e-3</ixy>
<ixz>-2.419e-3</ixz>
<iyy>5.657e-1</iyy>
<iyz>-3.394e-4</iyz>
<izz>6.865e-1</izz>
</inertia>
</inertial>
<visual name="Corps_CAP_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Corps.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="Corps_CAP_collision">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Corps.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<!-- ############################# -->
<!-- ##### Link: rotor_0 RFU ##### -->
<!-- ############################# -->
<link name="rotor_0">
<pose>0.393586 -0.468178 0.334203 0 0 0</pose>
<inertial>
<pose>0 0 0.025692 0 -0 0</pose>
<mass>0.366</mass>
<inertia>
<ixx>1.542e-3</ixx>
<ixy>-2.168e-3</ixy>
<ixz>-5.483e-9</ixz>
<iyy>3.613e-3</iyy>
<iyz>3.62e-9</iyz>
<izz>5.037e-3</izz>
</inertia>
</inertial>
<visual name="rotor_0_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CCW_Up.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="rotor_0_collision">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CCW_Up.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<joint name="rotor_0_joint" type="revolute">
<child>rotor_0</child>
<parent>Corps_CAP</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- ############################# -->
<!-- ##### Link: rotor_1 LFU ##### -->
<!-- ############################# -->
<link name="rotor_1">
<pose>0.393586 0.468178 0.334203 0 0 0</pose>
<inertial>
<pose>0 0 0.025692 0 -0 0</pose>
<mass>0.366</mass>
<inertia>
<ixx>1.542e-3</ixx>
<ixy>-2.168e-3</ixy>
<ixz>-5.483e-9</ixz>
<iyy>3.613e-3</iyy>
<iyz>3.62e-9</iyz>
<izz>5.037e-3</izz>
</inertia>
</inertial>
<visual name="rotor_1_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CW_Up.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="rotor_1_collision">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CW_Up.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<joint name="rotor_1_joint" type="revolute">
<child>rotor_1</child>
<parent>Corps_CAP</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- ############################# -->
<!-- ##### Link: rotor_2 LBU ##### -->
<!-- ############################# -->
<link name="rotor_2">
<pose>-0.393586 0.468178 0.334203 0 0 0</pose>
<inertial>
<pose>0 0 0.025692 0 -0 0</pose>
<mass>0.366</mass>
<inertia>
<ixx>1.542e-3</ixx>
<ixy>-2.168e-3</ixy>
<ixz>-5.483e-9</ixz>
<iyy>3.613e-3</iyy>
<iyz>3.62e-9</iyz>
<izz>5.037e-3</izz>
</inertia>
</inertial>
<visual name="rotor_2_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CCW_Up.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="rotor_2_collision">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CCW_Up.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<joint name="rotor_2_joint" type="revolute">
<child>rotor_2</child>
<parent>Corps_CAP</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- ############################# -->
<!-- ##### Link: rotor_3 RBU ##### -->
<!-- ############################# -->
<link name="rotor_3">
<pose>-0.393586 -0.468178 0.334203 0 0 0</pose>
<inertial>
<pose>0 0 0.025692 0 -0 0</pose>
<mass>0.366</mass>
<inertia>
<ixx>1.542e-3</ixx>
<ixy>-2.168e-3</ixy>
<ixz>-5.483e-9</ixz>
<iyy>3.613e-3</iyy>
<iyz>3.62e-9</iyz>
<izz>5.037e-3</izz>
</inertia>
</inertial>
<visual name="rotor_3_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CW_Up.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="rotor_3_collision">
<pose> 0 0 0 0 0 0 </pose>
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CW_Up.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<joint name="rotor_3_joint" type="revolute">
<child>rotor_3</child>
<parent>Corps_CAP</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- ############################# -->
<!-- ##### Link: rotor_4 RFD ##### -->
<!-- ############################# -->
<link name="rotor_4">
<pose>0.393586 -0.468178 0.304203 3.1416 0 0</pose>
<inertial>
<pose>0 0 0.025692 0 -0 0</pose>
<mass>0.366</mass>
<inertia>
<ixx>1.542e-3</ixx>
<ixy>-2.168e-3</ixy>
<ixz>-5.483e-9</ixz>
<iyy>3.613e-3</iyy>
<iyz>3.62e-9</iyz>
<izz>5.037e-3</izz>
</inertia>
</inertial>
<visual name="rotor_4_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CW_Down.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="rotor_4_collision">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CW_Down.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<joint name="rotor_4_joint" type="revolute">
<child>rotor_4</child>
<parent>Corps_CAP</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- ############################# -->
<!-- ##### Link: rotor_5 LFD ##### -->
<!-- ############################# -->
<link name="rotor_5">
<pose>0.393586 0.468178 0.304203 3.1416 0 0</pose>
<inertial>
<pose>0 0 0.025692 0 -0 0</pose>
<mass>0.366</mass>
<inertia>
<ixx>1.542e-3</ixx>
<ixy>-2.168e-3</ixy>
<ixz>-5.483e-9</ixz>
<iyy>3.613e-3</iyy>
<iyz>3.62e-9</iyz>
<izz>5.037e-3</izz>
</inertia>
</inertial>
<visual name="rotor_5_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CCW_Down.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="rotor_5_collision">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CCW_Down.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<joint name="rotor_5_joint" type="revolute">
<child>rotor_5</child>
<parent>Corps_CAP</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- ############################# -->
<!-- ##### Link: rotor_6 LBD ##### -->
<!-- ############################# -->
<link name="rotor_6">
<pose>-0.393586 0.468178 0.304203 3.1416 0 0</pose>
<inertial>
<pose>0 0 0.025692 0 -0 0</pose>
<mass>0.366</mass>
<inertia>
<ixx>1.542e-3</ixx>
<ixy>-2.168e-3</ixy>
<ixz>-5.483e-9</ixz>
<iyy>3.613e-3</iyy>
<iyz>3.62e-9</iyz>
<izz>5.037e-3</izz>
</inertia>
</inertial>
<visual name="rotor_6_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CW_Down.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="rotor_6_collision">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CW_Down.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<joint name="rotor_6_joint" type="revolute">
<child>rotor_6</child>
<parent>Corps_CAP</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<!-- ############################# -->
<!-- ##### Link: rotor_7 RBD ##### -->
<!-- ############################# -->
<link name="rotor_7">
<pose>-0.393586 -0.468178 0.304203 3.1416 0 0</pose>
<inertial>
<pose>0 0 0.025692 0 -0 0</pose>
<mass>0.366</mass>
<inertia>
<ixx>1.542e-3</ixx>
<ixy>-2.168e-3</ixy>
<ixz>-5.483e-9</ixz>
<iyy>3.613e-3</iyy>
<iyz>3.62e-9</iyz>
<izz>5.037e-3</izz>
</inertia>
</inertial>
<visual name="rotor_7_visual">
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CCW_Down.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
<material>
<ambient>0.5 0.5 0.5 1</ambient>
<diffuse>0.5 0.5 0.5 1</diffuse>
</material>
</visual>
<collision name="rotor_7_collision">
<pose> 0 0 0 0 0 0 </pose>
<geometry>
<mesh>
<uri>model://cap3/meshes/LCO_Rotor_CCW_Down.stl</uri>
<scale>0.001 0.001 0.001</scale>
</mesh>
</geometry>
</collision>
</link>
<joint name="rotor_7_joint" type="revolute">
<child>rotor_7</child>
<parent>Corps_CAP</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<plugin name='rotor_0' filename='libgazebo_motor_model.so'>
<robotNamespace>cap3</robotNamespace>
<jointName>rotor_0_joint</jointName>
<linkName>rotor_0</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1500</maxRotVelocity>
<motorConstant>0.005</motorConstant>
<momentConstant>0.08</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>0</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/0</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<plugin name='rotor_1' filename='libgazebo_motor_model.so'>
<robotNamespace>cap3</robotNamespace>
<jointName>rotor_1_joint</jointName>
<linkName>rotor_1</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1500</maxRotVelocity>
<motorConstant>0.005</motorConstant>
<momentConstant>0.08</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>1</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/1</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<plugin name='rotor_2' filename='libgazebo_motor_model.so'>
<robotNamespace>cap3</robotNamespace>
<jointName>rotor_2_joint</jointName>
<linkName>rotor_2</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1500</maxRotVelocity>
<motorConstant>0.005</motorConstant>
<momentConstant>0.08</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>2</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/2</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<plugin name='rotor_3' filename='libgazebo_motor_model.so'>
<robotNamespace>cap3</robotNamespace>
<jointName>rotor_3_joint</jointName>
<linkName>rotor_3</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1500</maxRotVelocity>
<motorConstant>0.005</motorConstant>
<momentConstant>0.08</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>3</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/3</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<plugin name='rotor_4' filename='libgazebo_motor_model.so'>
<robotNamespace>cap3</robotNamespace>
<jointName>rotor_4_joint</jointName>
<linkName>rotor_4</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1500</maxRotVelocity>
<motorConstant>0.005</motorConstant>
<momentConstant>0.08</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>4</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/4</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<plugin name='rotor_5' filename='libgazebo_motor_model.so'>
<robotNamespace>cap3</robotNamespace>
<jointName>rotor_5_joint</jointName>
<linkName>rotor_5</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1500</maxRotVelocity>
<motorConstant>0.005</motorConstant>
<momentConstant>0.08</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>5</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/5</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<plugin name='rotor_6' filename='libgazebo_motor_model.so'>
<robotNamespace>cap3</robotNamespace>
<jointName>rotor_6_joint</jointName>
<linkName>rotor_6</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1500</maxRotVelocity>
<motorConstant>0.005</motorConstant>
<momentConstant>0.08</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>6</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/6</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<plugin name='rotor_7' filename='libgazebo_motor_model.so'>
<robotNamespace>cap3</robotNamespace>
<jointName>rotor_7_joint</jointName>
<linkName>rotor_7</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1500</maxRotVelocity>
<motorConstant>0.005</motorConstant>
<momentConstant>0.08</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>7</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/7</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<model name='gps0'>
<link name='link'>
<pose>0 0 0.225 0 -0 0</pose>
<inertial>
<mass>0.01</mass>
<inertia>
<ixx>2.1733e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>2.1733e-06</iyy>
<iyz>0</iyz>
<izz>1.8e-07</izz>
</inertia>
</inertial>
<sensor name='gps' type='gps'>
<pose>0 0 0 0 0 0</pose>
<plugin name='gps_plugin' filename='libgazebo_gps_plugin.so'>
<always_on>true</always_on>
<robotNamespace>cap3</robotNamespace>
<gpsNoise>1</gpsNoise>
<gpsXYRandomWalk>2.0</gpsXYRandomWalk>
<gpsZRandomWalk>4.0</gpsZRandomWalk>
<gpsXYNoiseDensity>0.0002</gpsXYNoiseDensity>
<gpsZNoiseDensity>0.0004</gpsZNoiseDensity>
<gpsVXYNoiseDensity>0.2</gpsVXYNoiseDensity>
<gpsVZNoiseDensity>0.4</gpsVZNoiseDensity>
</plugin>
</sensor>
</link>
</model>
<joint name='gps0_joint' type='fixed'>
<parent>Corps_CAP</parent>
<child>gps0::link</child>
</joint>
<link name='imu_link'>
<pose>0 0 0 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.015</mass>
<inertia>
<ixx>1e-05</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>1e-05</iyy>
<iyz>0</iyz>
<izz>1e-05</izz>
</inertia>
</inertial>
</link>
<joint name='imu_joint' type='fixed'>
<child>imu_link</child>
<parent>Corps_CAP</parent>
</joint>
<plugin name='rosbag' filename='libgazebo_multirotor_base_plugin.so'>
<robotNamespace>cap3</robotNamespace>
<linkName>Corps_CAP</linkName>
<rotorVelocitySlowdownSim>1</rotorVelocitySlowdownSim>
</plugin>
<plugin name='groundtruth_plugin' filename='libgazebo_groundtruth_plugin.so'>
<robotNamespace>cap3</robotNamespace>
<always_on>true</always_on>
</plugin>
<plugin name='magnetometer_plugin' filename='libgazebo_magnetometer_plugin.so'>
<robotNamespace>cap3</robotNamespace>
<always_on>true</always_on>
<pubRate>100</pubRate>
<noiseDensity>0.0004</noiseDensity>
<randomWalk>6.4e-06</randomWalk>
<biasCorrelationTime>600</biasCorrelationTime>
<magTopic>/mag</magTopic>
</plugin>
<plugin name='barometer_plugin' filename='libgazebo_barometer_plugin.so'>
<robotNamespace>cap3</robotNamespace>
<always_on>true</always_on>
<pubRate>50</pubRate>
<baroTopic>/baro</baroTopic>
<baroDriftPaPerSec>0</baroDriftPaPerSec>
</plugin>
<plugin name='mavlink_interface' filename='libgazebo_mavlink_interface.so'>
<robotNamespace>cap3</robotNamespace>
<always_on>true</always_on>
<imuSubTopic>/imu</imuSubTopic>
<magSubTopic>/mag</magSubTopic>
<baroSubTopic>/baro</baroSubTopic>
<mavlink_addr>INADDR_ANY</mavlink_addr>
<mavlink_udp_port>14560</mavlink_udp_port>
<mavlink_tcp_port>4560</mavlink_tcp_port>
<serialEnabled>false</serialEnabled>
<serialDevice>/dev/ttyACM0</serialDevice>
<baudRate>921600</baudRate>
<qgc_addr>INADDR_ANY</qgc_addr>
<qgc_udp_port>14550</qgc_udp_port>
<sdk_addr>INADDR_ANY</sdk_addr>
<sdk_udp_port>14540</sdk_udp_port>
<hil_mode>0</hil_mode>
<hil_state_level>0</hil_state_level>
<vehicle_is_tailsitter>0</vehicle_is_tailsitter>
<send_vision_estimation>1</send_vision_estimation>
<send_odometry>1</send_odometry>
<enable_lockstep>1</enable_lockstep>
<use_tcp>1</use_tcp>
<motorSpeedCommandPubTopic>/gazebo/command/motor_speed</motorSpeedCommandPubTopic>
<control_channels>
<channel name="rotor0">
<input_index>0</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_0_joint</joint_name>
</channel>
<channel name="rotor1">
<input_index>1</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_1_joint</joint_name>
</channel>
<channel name="rotor2">
<input_index>2</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_2_joint</joint_name>
</channel>
<channel name="rotor3">
<input_index>3</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_3_joint</joint_name>
</channel>
<channel name="rotor4">
<input_index>4</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_4_joint</joint_name>
</channel>
<channel name="rotor5">
<input_index>5</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_5_joint</joint_name>
</channel>
<channel name="rotor6">
<input_index>6</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_6_joint</joint_name>
</channel>
<channel name="rotor7">
<input_index>7</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_name>rotor_7_joint</joint_name>
</channel>
</control_channels>
</plugin>
<plugin name='gazebo_imu_plugin' filename='libgazebo_imu_plugin.so'>
<robotNamespace>cap3</robotNamespace>
<linkName>imu_link</linkName>
<imuTopic>/imu</imuTopic>
<gyroscopeNoiseDensity>0.0003394</gyroscopeNoiseDensity>
<accelerometerNoiseDensity>0.004</accelerometerNoiseDensity>
<frameId>imu_link</frameId>
</plugin>
Airframe
#!/bin/sh
#@name CAP3 Octo-X Coaxial
#@type Octorotor Coaxial X
#@class Copter
#@output MAIN1 RFU (0)
#@output MAIN2 LFU (1)
#@output MAIN3 LBU (2)
#@output MAIN4 RBU (3)
#@output MAIN5 RFD (4)
#@output MAIN6 LFD (5)
#@output MAIN7 LBD (6)
#@output MAIN8 RBD (7)
. ${R}etc/init.d/rc.mc_defaults
param set-default CA_AIRFRAME 0
param set-default MAV_TYPE 14 # MAV_TYPE_OCTOROTOR
param set-default CA_ROTOR_COUNT 8
param set-default CA_ROTOR1_PX 0.393586
param set-default CA_ROTOR1_PY -0.468178
param set-default CA_ROTOR1_PZ 0.334203
param set-default CA_ROTOR1_KM -0.08
param set-default CA_ROTOR0_PX 0.393586
param set-default CA_ROTOR0_PY 0.468178
param set-default CA_ROTOR0_PZ 0.334203
param set-default CA_ROTOR0_KM 0.08
param set-default CA_ROTOR3_PX -0.393586
param set-default CA_ROTOR3_PY 0.468178
param set-default CA_ROTOR3_PZ 0.334203
param set-default CA_ROTOR3_KM -0.08
param set-default CA_ROTOR2_PX -0.393586
param set-default CA_ROTOR2_PY -0.468178
param set-default CA_ROTOR2_PZ 0.334203
param set-default CA_ROTOR2_KM 0.08
param set-default CA_ROTOR5_PX 0.393586
param set-default CA_ROTOR5_PY -0.468178
param set-default CA_ROTOR5_PZ 0.304203
param set-default CA_ROTOR5_KM 0.08
param set-default CA_ROTOR4_PX 0.393586
param set-default CA_ROTOR4_PY 0.468178
param set-default CA_ROTOR4_PZ 0.304203
param set-default CA_ROTOR4_KM -0.08
param set-default CA_ROTOR7_PX -0.393586
param set-default CA_ROTOR7_PY 0.468178
param set-default CA_ROTOR7_PZ 0.304203
param set-default CA_ROTOR7_KM 0.08
param set-default CA_ROTOR6_PX -0.393586
param set-default CA_ROTOR6_PY -0.468178
param set-default CA_ROTOR6_PZ 0.304203
param set-default CA_ROTOR6_KM -0.08
param set-default PWM_MAIN_FUNC1 101
param set-default PWM_MAIN_FUNC2 102
param set-default PWM_MAIN_FUNC3 103
param set-default PWM_MAIN_FUNC4 104
param set-default PWM_MAIN_FUNC5 105
param set-default PWM_MAIN_FUNC6 106
param set-default PWM_MAIN_FUNC7 107
param set-default PWM_MAIN_FUNC8 108
Any advice or suggestions would be greatly appreciated. Please let me know if additional information is needed.
Thank you in advance for your help.
Best regards,