Hi, all,
I am using PX4 flight stack 1.10.1 stable and mavros to execute a trajectory. I sampled the setpoints from a trajectory and publish them to the ros topic /mavros/setpoint_position/local. The trajectory was executed well, but I run into failsafe enable: no offboard error at the end (the error is reasonable because I stopped sending setpoints).
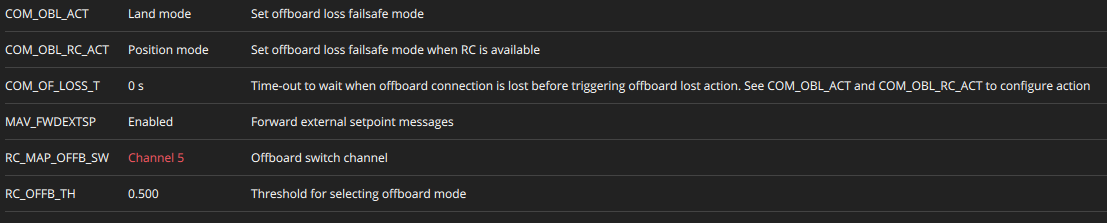
At the end of trajectory execution, I just stopped sending setpoint but the vehicle was still armed. I expected it will switch to Position mode, however, it turned out to be altitude mode. Here is the parameters related to offboard:
And my flight log is here.
I want the vehicle to get into Position mode after quitting Offboard mode . Could anybody help me with that? Any help will be of great appreciation.