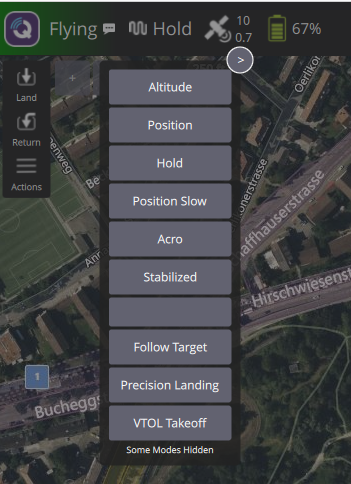
Hello, I have my PX4 (SITL) x500 drone took off from QGC but I can not further see the offboard mode in QGC. The screenshot is also attached.
QGC version you are using?
I am new to using QGC, would you please let me know where I can find the QGC version?
I directly installed QGC app image for my Ubuntu 22.04 following the installation guide (Download and Install | QGC Guide)
Edit:
Its v5.0.7 64 bit
Have you given the trajectory setpoints sometimes, the mode is not shown until to publish data for offboard look at the following ROS 2 Offboard . If it doesn’t work, reinstall or downgrade the QGC
Yes, I also tried publishing the trajectory setpoints but it still does not show the Offboard mode in QGC. I will try re-installing or downgrading it.
If you install the QGC daily build. Install the stable version instead
Sure, thanks! I will do as suggested.