Hi all,
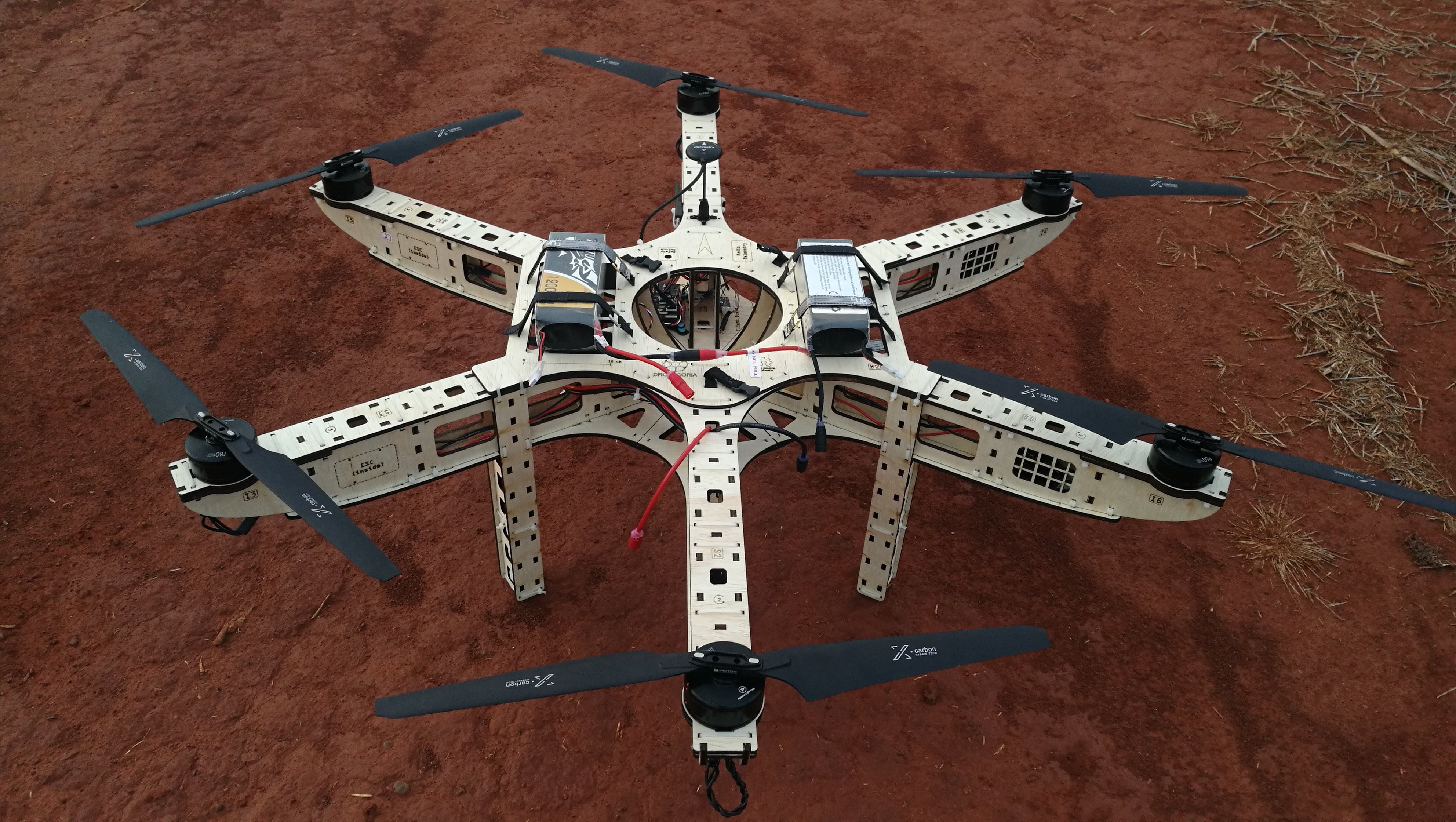
I build an hexacopter for seed cargo for reforestation, but it crashed after takeoff.
You can check the video here:

I try to upload the log to logs.px4.io, I don’t know why but I get an error:
HTTP Error 400: Invalid File
So I uploaded here:
https://plot.dron.ee/sBZg
For the type of crash, looks a wrong motor order or prop direction, but I checked again after the crash and was correct.
Could somebody help me to identity the error?
This is the errors and messages that I see:
- ERRORS
- TIME Subsys ECode Description
- 17:51:21 24 1 EKF PRIMARY: OCCURED OR FAILED TO INITILIASE
- 17:51:22 24 0 EKF PRIMARY: ERROR RESOLVED/CLEARED
- 17:51:22 11 2 GPS: GPS GLITCH
- 17:51:23 12 1 CRASH CHECK: CHECK CRASH
- 17:51:30 11 0 GPS: ERROR RESOLVED/CLEARED
- LOG
- TIME MESSAGE
- 17:51:11 ArduCopter V3.6.11 (f0d59294)
- 17:51:11 ChibiOS: ab2f8d8d
- 17:51:11 fmuv5 0032001F 31385118 35343633
- 17:51:11 New mission
- 17:51:11 Frame: HEXA
- 17:51:11 GPS 1: detected as u-blox at 115200 baud
- 17:51:11 u-blox 1 HW: 00080000 SW: EXT CORE 3.01 (107900)
- 17:51:21 EKF primary changed:1
- 17:51:22 EKF primary changed:0
- 17:51:22 GPS Glitch
- 17:51:23 Crash: Disarming
- 17:51:30 GPS Glitch cleared
Thank you!