Hello All,
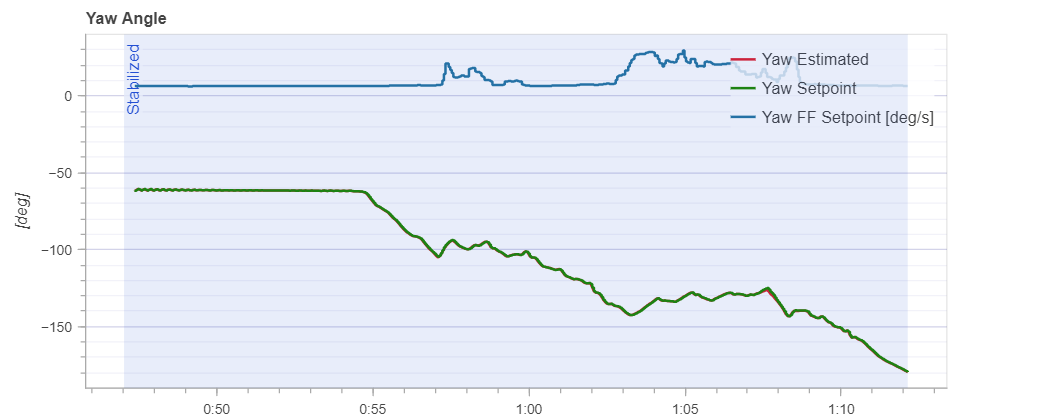
We have been building this bicopter since quite a while now. It is giving too much pendulum like oscillations in pitch. When I see the logs, yaw is also decreasing over time. I am attaching logs, please guide what we can do to make the yaw and pitch stable. https://drive.google.com/file/d/1nJtCsHo6x2vHXLeWCLGqiwhCQrM-jEeJ/view?usp=sharing
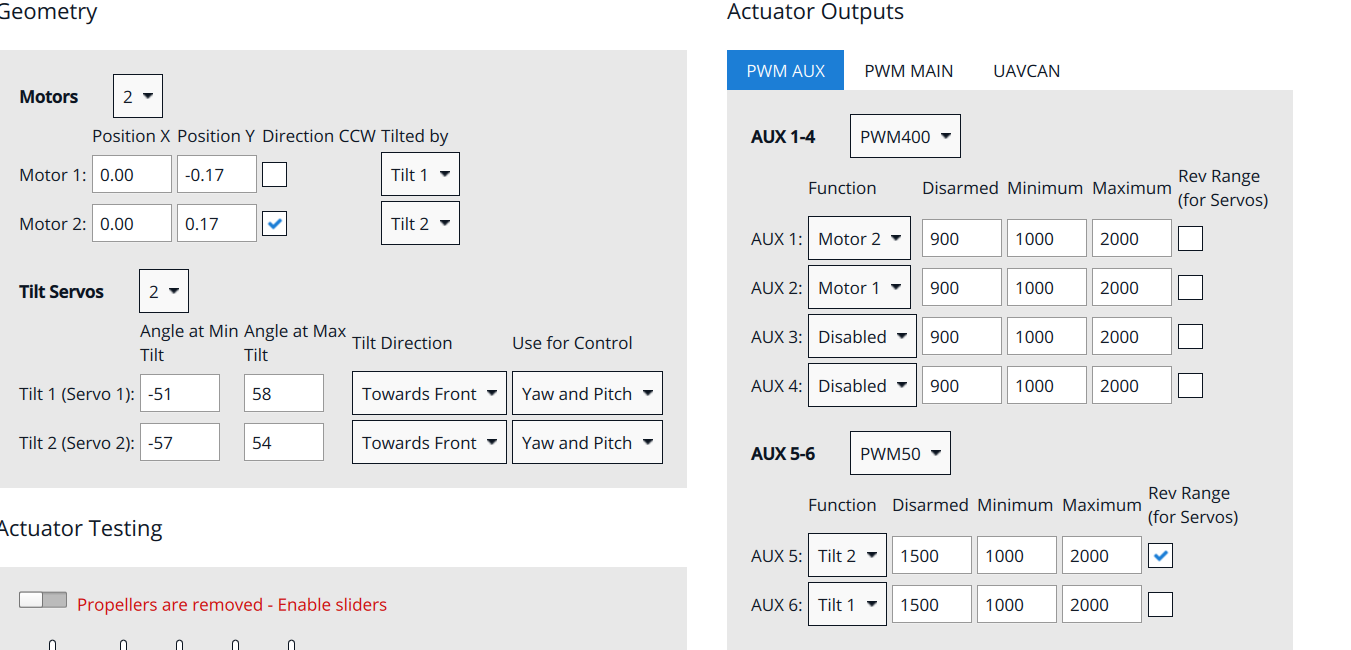
P.S: I have restricted servo motions in the actuators just as shown in this picture