Hello,
While flying, I started to discover some issues with the internal barometer. Here are some ground tests I did:
https://logs.px4.io/plot_app?log=f858554b-e9c6-4816-ba6b-cae1d395996a
https://logs.px4.io/plot_app?log=3acf3fba-9c71-47bb-9a7a-5751a30db9e1
https://logs.px4.io/plot_app?log=cabb7f09-51ba-4137-ab59-fe63c92d282b
Using Flightplot, I plotted Thrust (blue, 0-5) and measured altitude (red, meters). Here is the relation:
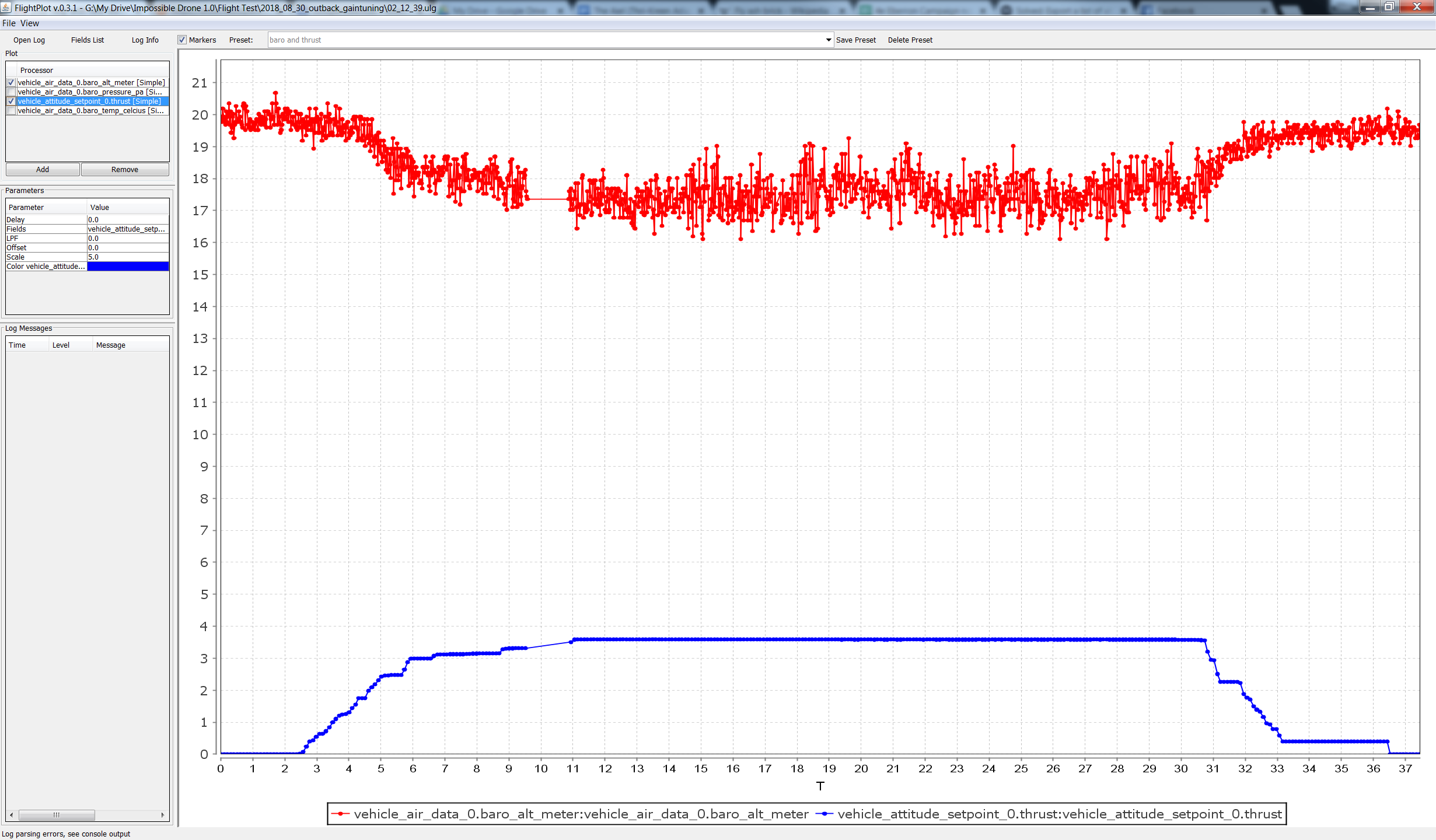
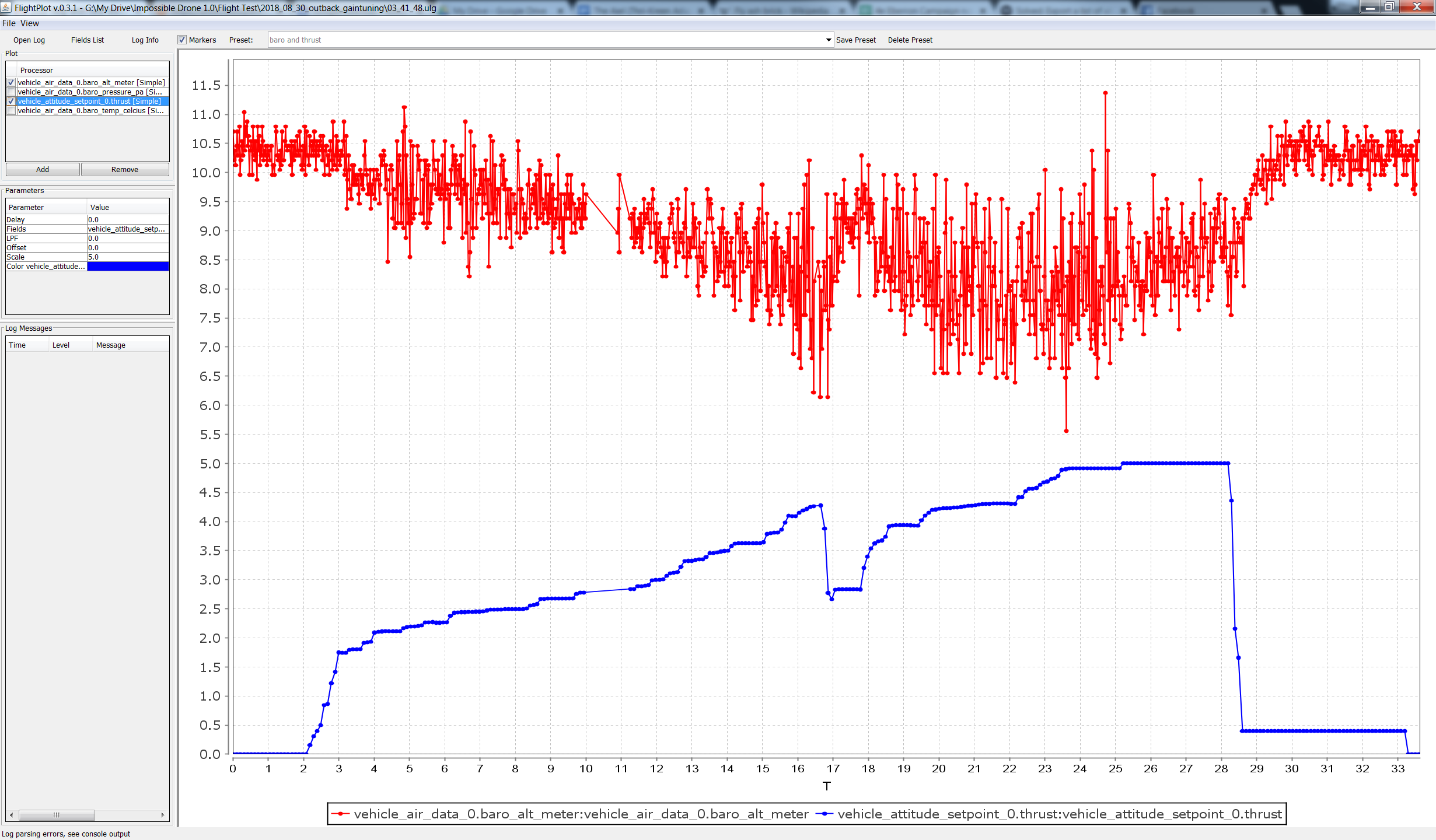
In all of these cases, I increased throttle until right before the vehicle was to lift off. During this, the relative altimeter started to read negatives values. I’ve also noticed this happen when I go into forward flight:
https://logs.px4.io/plot_app?log=398145d3-f182-4e0c-983e-984561fdf315
You can see at the end of the log file the barometer altitude shoots up and the vehicle plowed into the ground.
My question is: Why does this happen? How can I correct for it?
Current setup:
- Pixhawk Cube
- PX4 1.8.0
- QGround 3.4.3
Thanks
-Elias