@bresch I think in this case the P values were just too high. Here’s a log below of the crash right after the autotune. It just way overshoots the target pitch / roll.
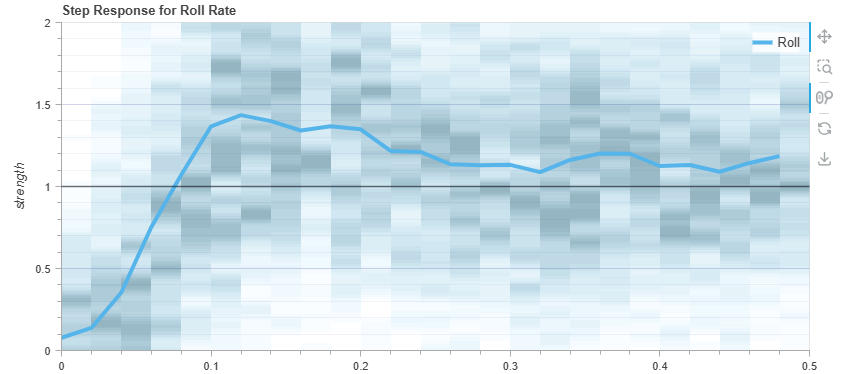
After reducing the gains by 30% it crashed again, you can see in the graph below from that crash that the roll axis just kept climbing above target because the gains were still too high.
We ended up bringing the P values in particular down about 50% before it seemed to be more stable and less crash-prone, but we’d prefer to figure out the MC_AT_RISE_TIME parameter to generate a good autotune.
Autotune generated PIDs:
MC_PITCHRATE_D 0.0017
MC_PITCHRATE_I 0.263
MC_PITCHRATE_P 0.2
MC_ROLLRATE_D 0.0001
MC_ROLLRATE_I 0.247
MC_ROLLRATE_P 0.189
FF is zero on both.
The drone flew really well after the autotune, but large inputs just overwhelms it and puts it into an oscillation that eventually causes crashing. We only solved it by limited the angular change.
Here’s another log after we had them reduce their gains quite a bit that shows the oscillation better.