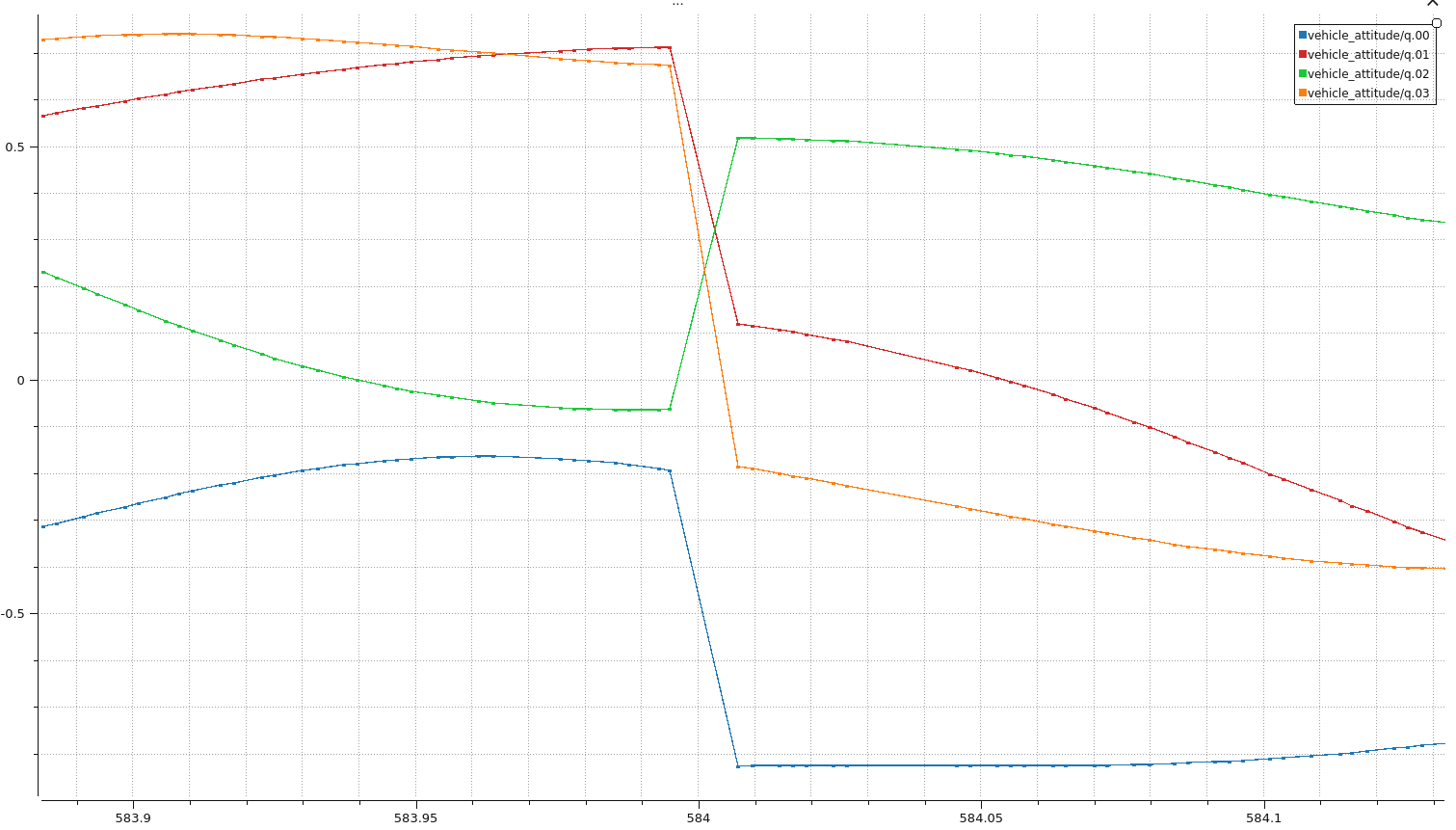
Saw a jump in the estimated quaternions which caused a major glitch in the estimated roll angler .This has caused an overcorrection and disturbance in the custom flight controller I have used for my custom fixed wing aircraft. I have attached a snapshot of the glitch. I didn’t observe any jumps in gyro data, could anyone explain why this could have happened? @dagar @LorenzMeier please have a look if possible.
I’m going to save the developers’ time and write that you should add a log file for this type for issues.
I cant share the complete log but I’ll share the related data in csv format.Here’s a drive link: https://drive.google.com/drive/folders/1eD9UXOMB8LsLm-e9LQWZOwtZEkql-f7u?usp=drive_link