Hi all,
I’m trying to understand something that happened in Altitude mode and would really appreciate some estimator-level insight.
Firmware: PX4 v1.16.1
What happened
-
Drone was hovering normally.
-
Mid-flight it started climbing unexpectedly.
-
I reduced throttle (including strong downward input).
-
The drone kept climbing.
-
In the log, EKF vertical velocity (
-vlp.vz) shows descent during that period. -
The controller reacted consistently with that estimate (increased thrust to “stop” the perceived descent).
So at that moment:
-
The drone was physically climbing (visually confirmed).
-
The barometer altitude trend (from
vehicle_air_data.baro_alt_meter) shows climb. -
EKF vertical velocity estimate shows descent.
What I’ve already ruled out:
-
No EKF instance switch.
-
No attitude resets.
-
Baro test_ratio stayed low.
-
cs_baro_hgt = 1(barometer was the active height source). -
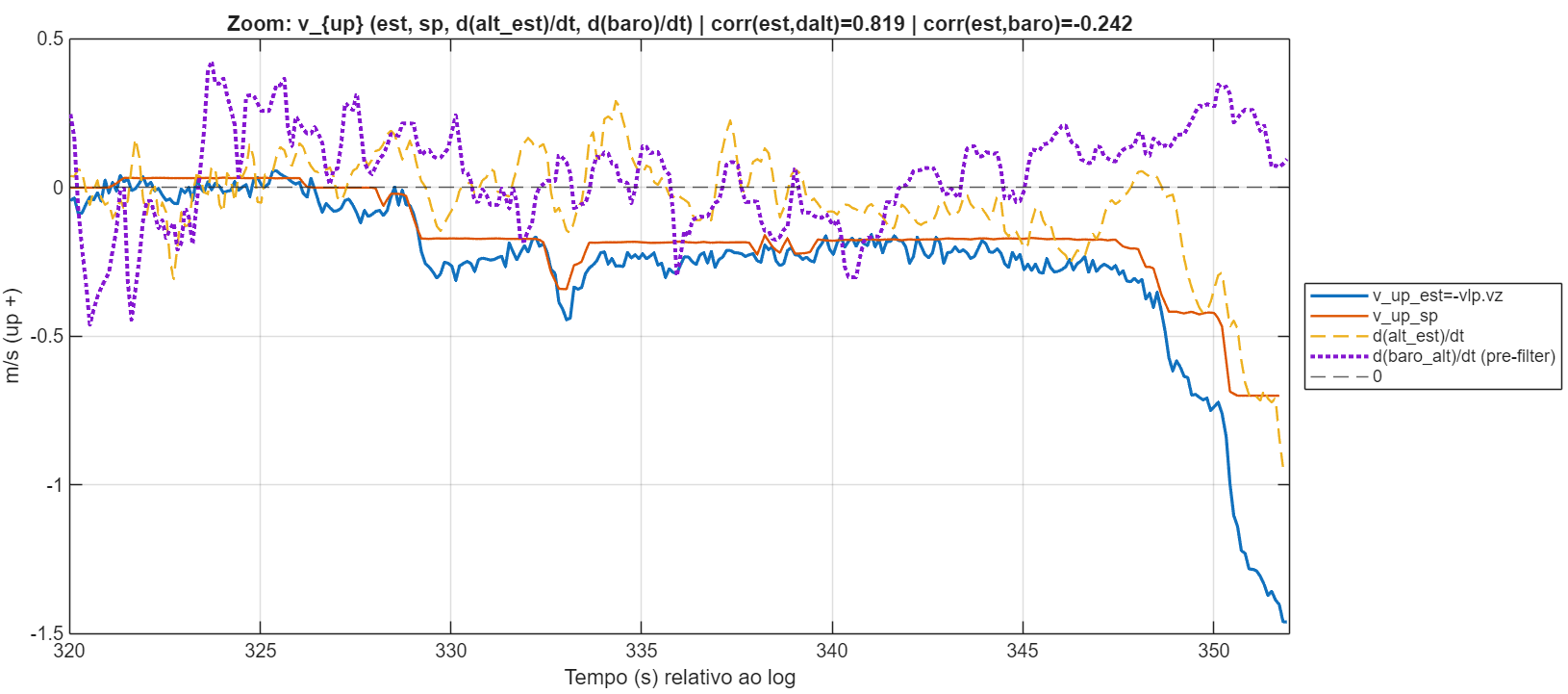
EKF appears to be internally consistent (
v_up_estmatchesd(alt_est)/dt) (see image below). -
Motors follow thrust setpoint normally.
So this doesn’t look like a classic reset or measurement rejection.
In the figure below, the X-axis represents log time in seconds (so 320 s ≈ 5:20 in the flight). The derivatives of the estimated altitude and the barometer altitude (used here as vertical velocity proxies) begin to diverge in that interval. After ~350 s (≈5:50), the data is no longer reliable, as the vehicle was already in an abnormal state and I attempted a non-standard external intervention to prevent further damage, which contaminates the measurements beyond that point.
Other observations
-
From some point onward, the drone flies with a persistent ~5° pitch offset.
Not sure if it’s related, but worth mentioning. -
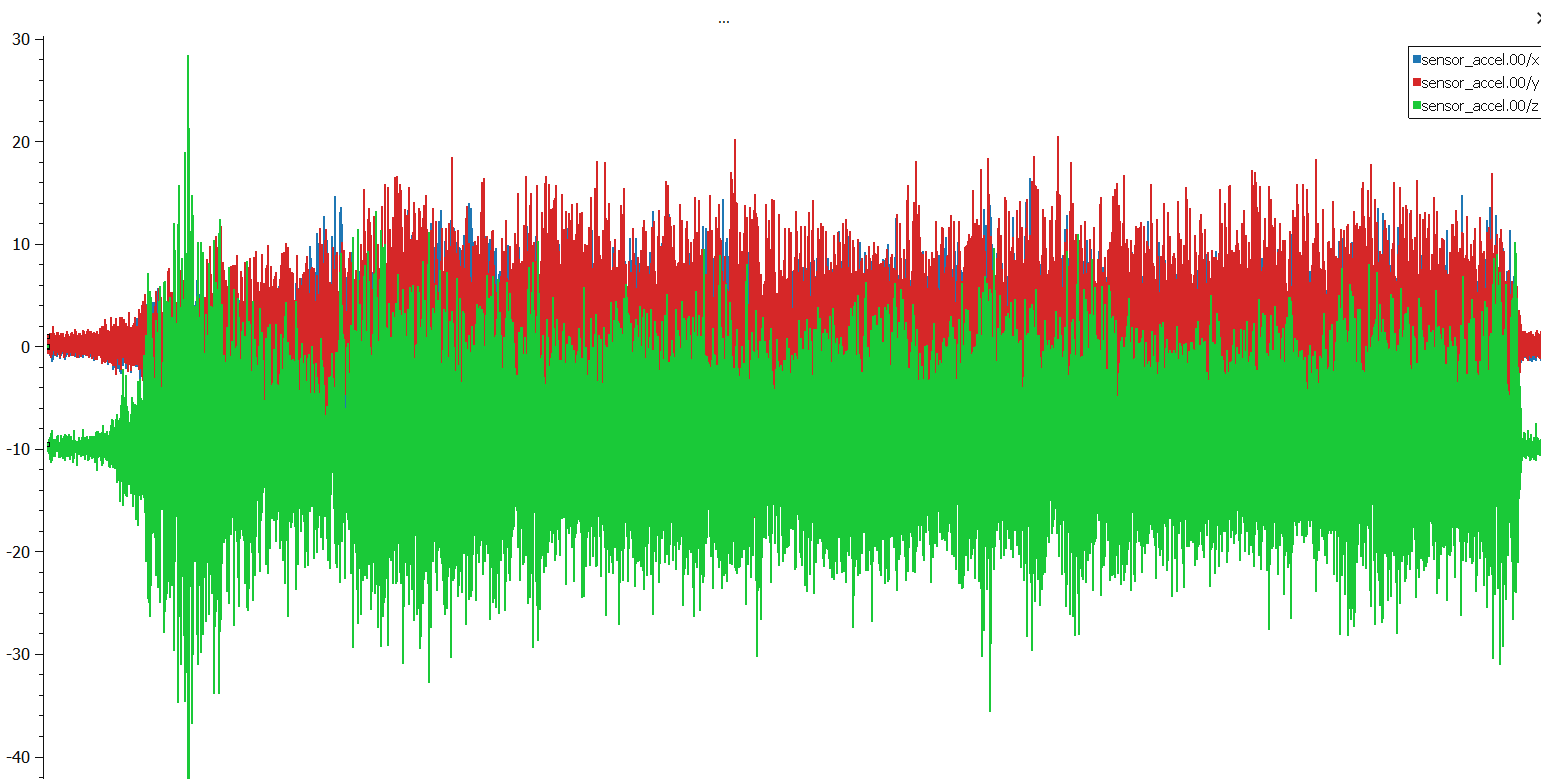
Vibration levels are higher than recommended.
-
GPS was physically connected but not used for estimation (
SYS_HAS_GPS = 0, and related parameters disabled). Height source was barometer only. -
Additionally, the Local Position X/Y values in Flight Review seem to be several orders of magnitude larger than expected, considering the vehicle never left a ~5 m radius from the takeoff point. I’m not sure whether this is a logging reference issue or something estimator-related
Main question
Is there a realistic EKF2 mechanism where high vibration (or something similar) could bias vertical acceleration/velocity enough to produce a sustained vertical velocity error without triggering innovation failures or high test_ratio?
In other words, can the estimator drift in vertical velocity while still looking statistically “healthy”?
Flight Review link:
If needed, I can upload the full .ulg file and/or .params for more details.
I’m trying to understand whether this smells like configuration, vibration-induced bias, or something deeper.