Hi,
I’m using a lidar and SLAM algorithm to give a local position estimate to the flight controller. It works great most of the time but sometimes the altitude is wrong:
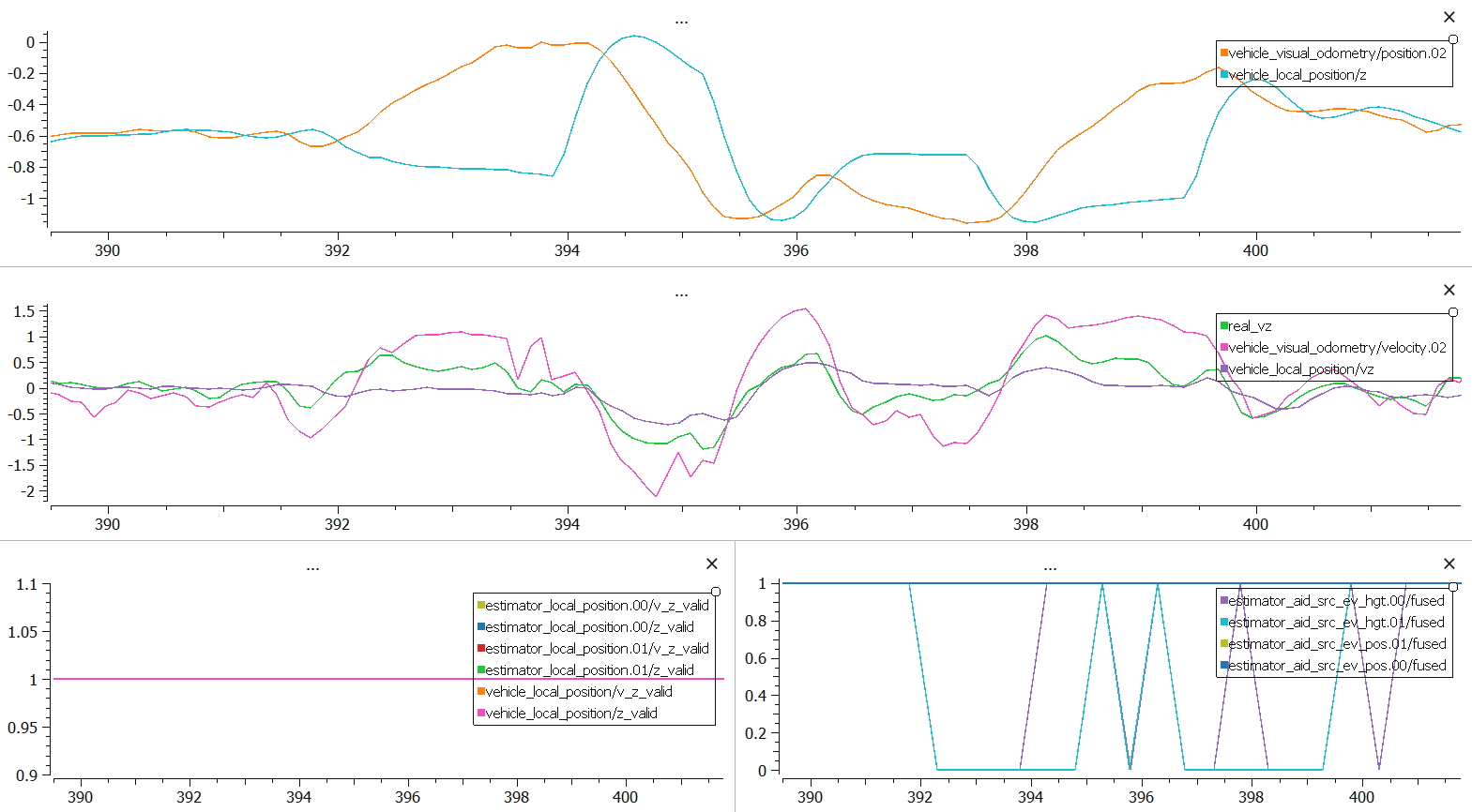
(real_vz is just the central difference derivative of slam position)
The estimated vertical speed is around 0 and the estimated altitude is stable, but the drone is going downward/upward. After some time, the estimate recovers.
z_valid, vz_valid flags are 1 for the entire flight.
estimator_aid_src_ev_hgt fused goes low when local position and SLAM get too different (expected behavior I guess).
GPS (EKF2_GPS_CTRL = 0), magnetometer (EKF2_MAG_TYPE=5) and Barometer (EKF2_BARO_CTRL = 0) are disabled, and EKF2_EV_CTRL = 11 (I had issues with velocity fusion activated, my slam estimated velocity is really high).
Has anyone had this issue ? (what am I doing wrong here x)
Should I re-enable EV velocity fusion, Barometer ?
Also, I understand that the ekf refuses to fuse if data seems weird, but here the slam is supposed to be more accurate than internal IMU odometry, and (v)z_valid = 1 even if the accurate source of estimate is not used. (again : what am I doing wrong here x)
Thanks,
Eriog