Hi all,
I am currently trying to fly one of the Coex Clover drones, and tuning it for v1.13.0. Using review.px4.io i’ve managed to tune attitude rate and attitude to I believe reasonable parameters and it flies great in Stabilised and Attitude modes.
However, the moment I go into Position Control mode the drone just jiggles wildly. kind of in place. I’m not sure I can describe it a aggressive oscillation as its not periodic. The below review should show it clearly at 15:18 onwards:
https://review.px4.io/plot_app?log=6d98a8b3-5bf6-4f5e-9ec1-9722c6bdd962
The thing I find really weird is that the generated roll setpoints don’t seem correct and are causing extreme oscillations in the roll-rate setpoints and controller. I assume its this causing the aggresive wiggling. Similarly for pitch and pitch rate.
I have tried to tune this velocity control but to no avail. Turning up the P just makes it worse, and I don’t know what effect if any D and I will have. So I would really appreciate some help here!
Currently running latest tag 1.13.0, running indoors using Motion Capture through MAVROS.
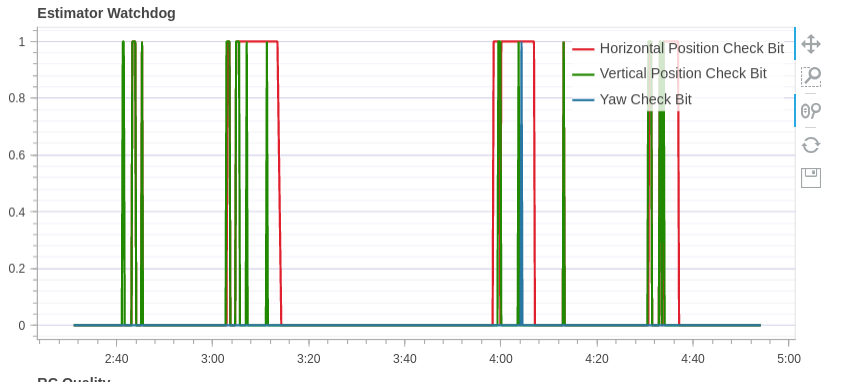
Edit: I did another flight the next day with high frequency logging enabled, and a slightly lower P value which elicited a better response, but still a lot of shaking:
https://review.px4.io/plot_app?log=f0755e23-1444-4a84-872c-c0aa38a326e9
Many Thanks