Hello everyone,
I am curious about why we are using Actuator Controls FFT, Isn’t it the output of control commands?
What is the logic behind this, because isn’t it logical to take FFT of sensor_combined GYRO FFTs.
At start I thought they are in same manner and I saw same affects on Hz that I detected, when I set a notch filter Hz from Gyro FFT it worked, but now I add some changes and upgrades to my vehicle and now I am seeing considerable amplitude on same Hz even though I set the notch to that Hz.
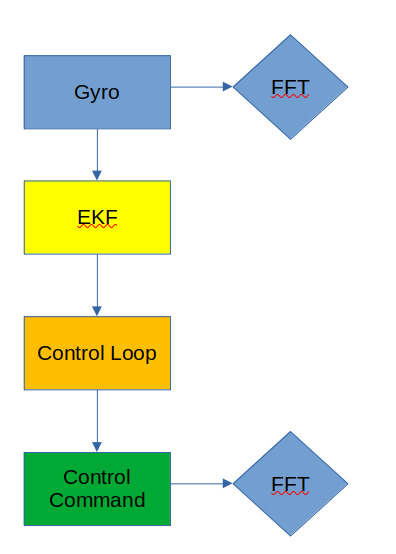
At this schema I started to think that when I set a notch filter Hz with GYRO FFT I am filtering the gyro data that goes through ekf and control loop. So may I filter the actual Hz indirectly? Should I always look the FFT of Control Commands and why?
I will be glad if you correct me and I am open to any resource.