Good morning everyone;
I am trying to use motion capture systems (mocap) for indoor drone flight. I am using firmware version 1.14.3. The mocap data is sent to the flight controller via MAVROS from the onboard computer (orin nx). However, I am encountering several errors reported by QGC, and the drone cannot arm. I suspect that I have not set the parameters correctly or the MAVROS messages do not specify the frame_id.
Interestingly, when I use firmware version 1.13.3, the drone can fly normally with no changes to the onboard computer code except for one place. In the messages sent to the flight controller, I did not even set vision.header.frame_id = “??”; I am unsure what to write here, but the flight controller operates correctly in position mode.
My hardware and software architecture is composed of:
-
Pixhawk 6c, Firmware 1.14.3
-
orin nx,ros1,ubuntu 20.04
-
optitrack
The orin nx is connected to the Pixhawk by USB, where MAVROS is initialized. It gets data from Mocap , perform coordinate transformation, and then send the data to the Pixhawk via USB.
To fuse vision data with EKF, I followed this one:Using Vision or Motion Capture Systems for Position Estimation , and I configured the EKF as follows:
EKF2_EV_CTRL = horizontal posion + vertical posion + yaw ;(11)
EKF2_HGT_REF = Vision;
EKF2_EV_DELAY = 0;
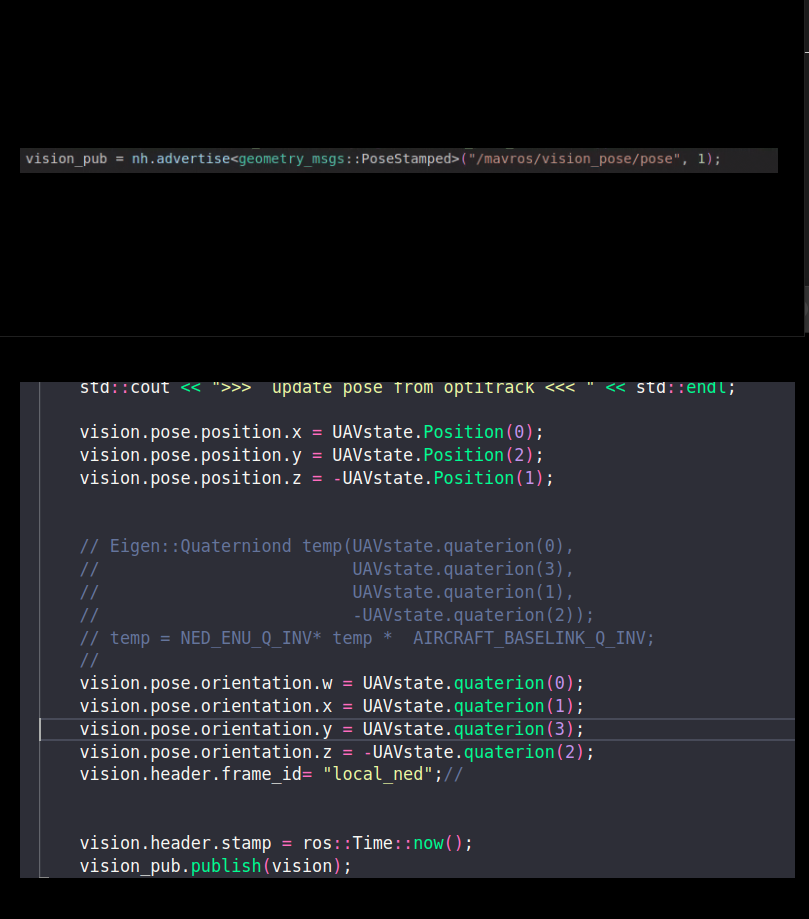
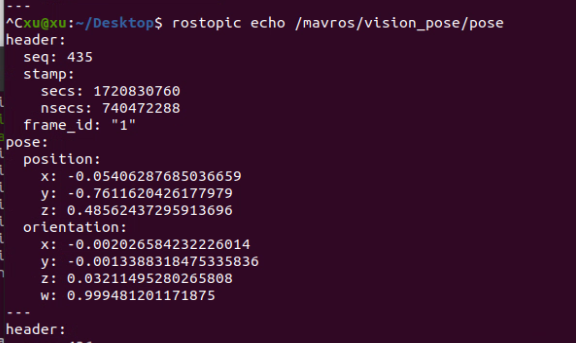
Here is the ros node in orin nx i send the data to pixhawk:
The topic of orin nx running output is as shown in the figure
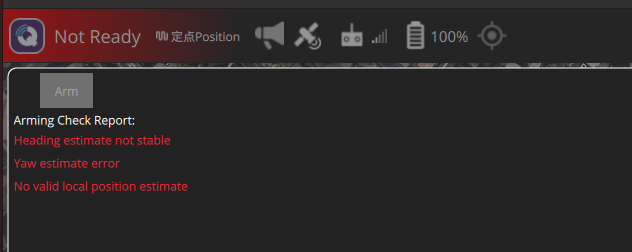
But QGC always prompts error:
yaw estimate error no valid
local position estimate
heading estimate not stable
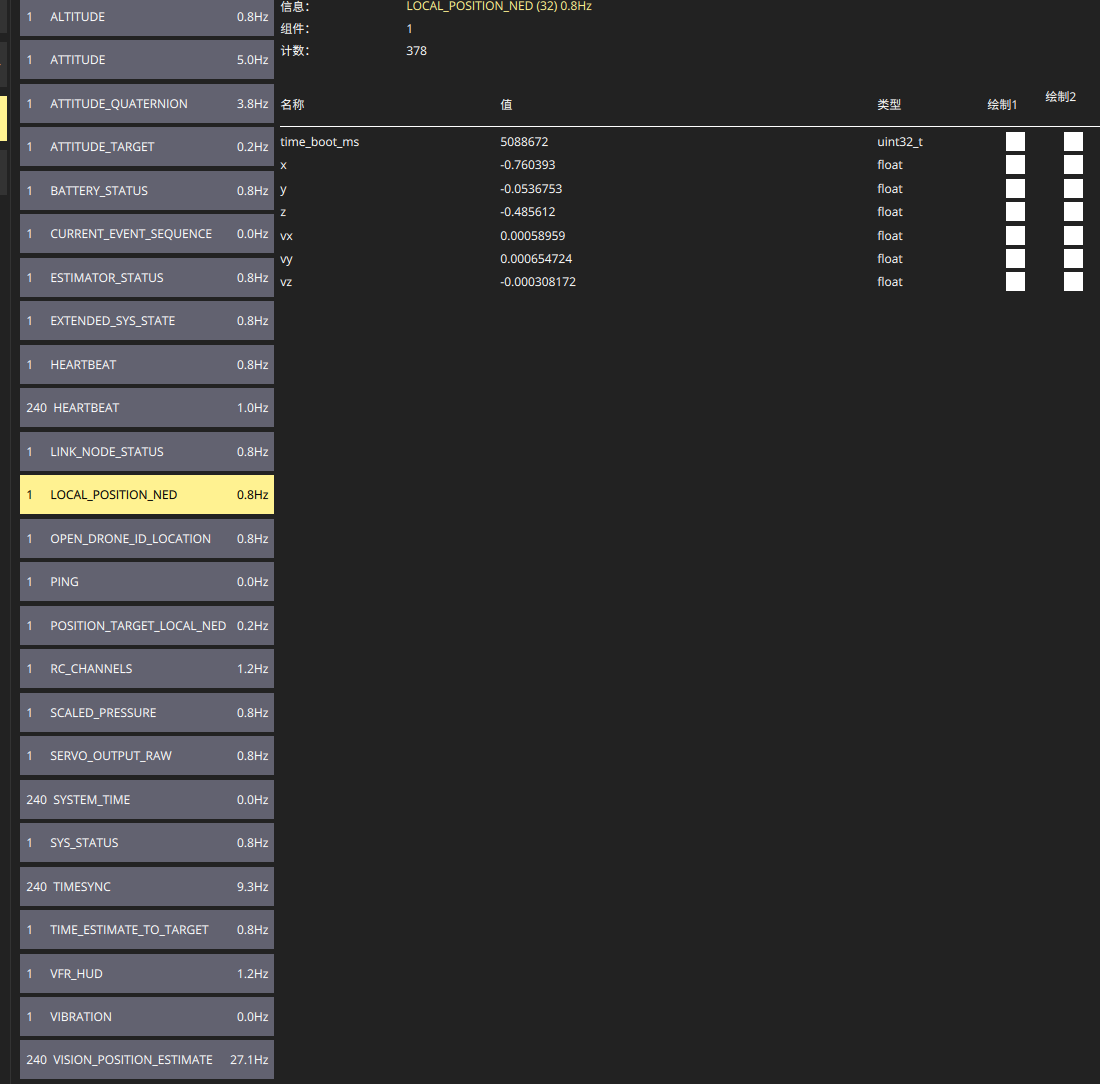
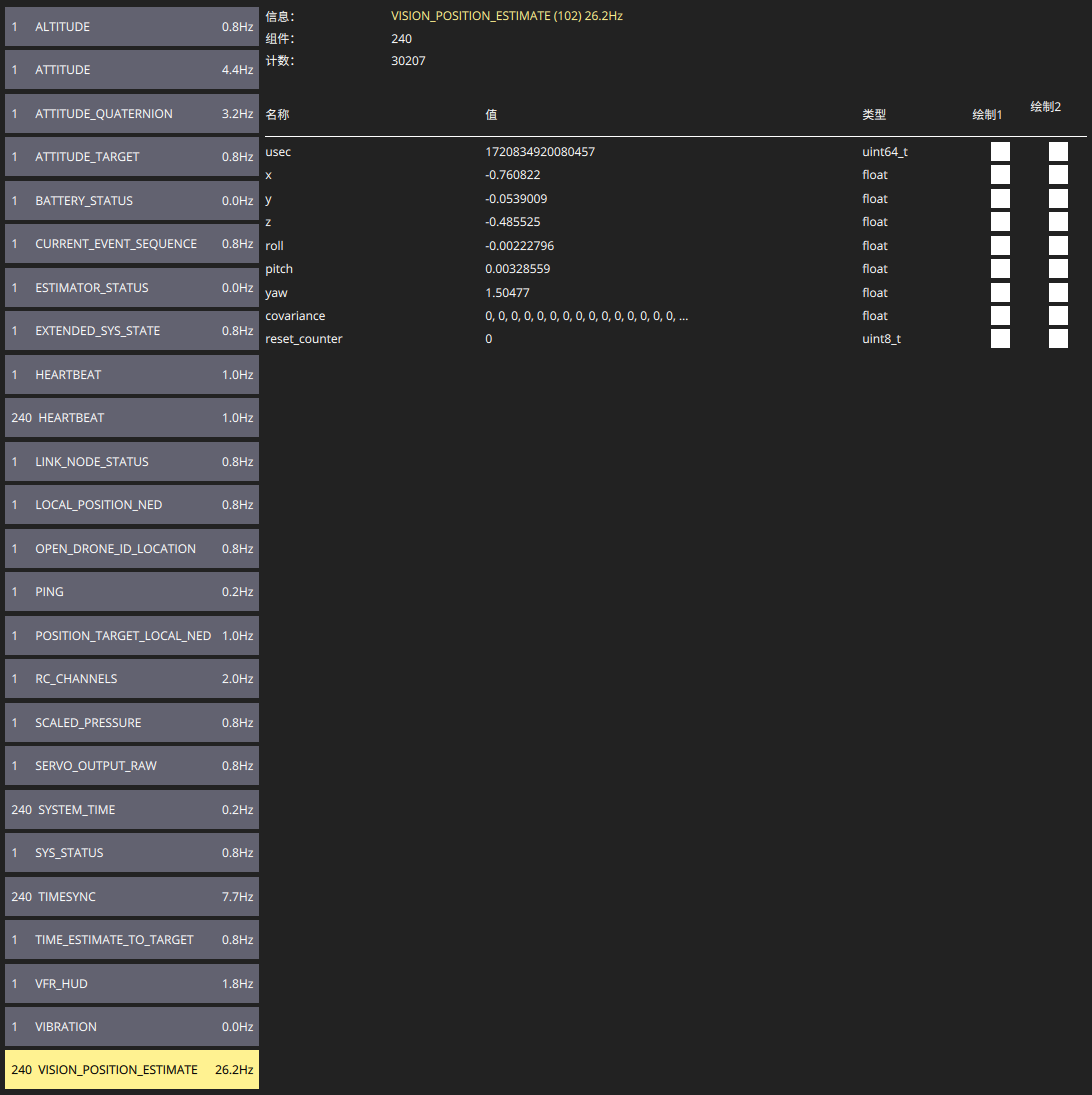
Additionally, I can see the VISION_POSITION_ESTIMATE message and LOCAL_POSITION_NEDin the real-time MAVLink messages detected by MAVLink.
when I use firmware version 1.13.3,I configured the EKF as follows:
EKF2_AID_MASK Set vision position fusion, vision yaw fusion and external vision rotation
EKF2_HGT_MODE Set to Vision to use the vision a primary source for altitude estimation.|
EKF2_EV_DELAY 0ms
After addressing this, QGC shows ready to fly in position mode, and the drone can fly indoors directly.
I am very puzzled. I think sending mocap positioning data to the flight controller should be a simple task, but why does version 1.14 always report errors? I have used not only 1.14.3 but also 1.14 stable, and both have the same errors! However, when I switch the firmware to 1.13, the above problems do not occur, and the drone can fly normally. This problem has been troubling me for several days, and I am getting frustrated. How can I solve this problem?
I hope someone can help me. Thank you in advance.