Hi,
We’re testing our custom visual odometry implementation, which sends the aircraft position and velocity estimates using the ODOMETRY message. By design the device is quite reliable in the X and Y axes but the Z axis position is quite drifty.
To compensate for this we’ve fitted our aircraft with a TFMini rangefinder, and accordingly set EKF2_HGT_MODE to use the rangefinder as the primary altitude source. The barometer is disabled as it’s an indoor aircraft, and EKF2_AID_MASK is set to use vision position/yaw/velocity fusion.
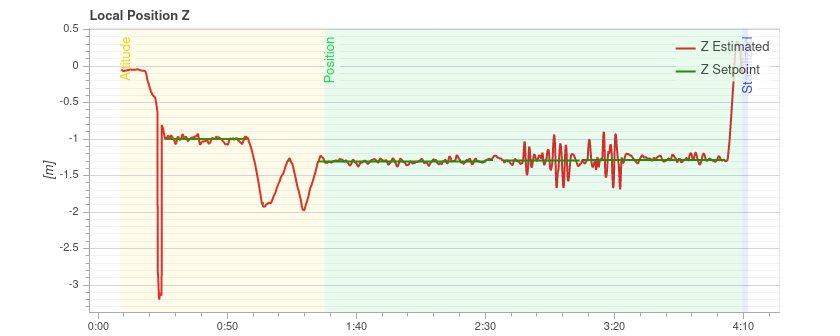
We have been looking at the logs, and if we attempt to take off in Altitude Hold, the local Z position usually exhibits a large spike, and sometimes leads to dangerous rapid climb behaviour - please see the attached figure:
We suspect that this is due to bad initialization of EKF covariances - would appreciate the community’s thoughts on this. Here is the flight log: Flight Review
Thanks,
Jiangxuan