Hi! I would like to ask why my PID gains changed after I arming my motor? The situation was I tuned the PID gains while disarming to make the compensation elevator degree between -5 to 5 degree, but the degree changed to -10-10 after I arming and the gain value was same.
That seems odd. Can you describe the PX4 version that you’re using, what airframe, which parameter you’re looking at and how?
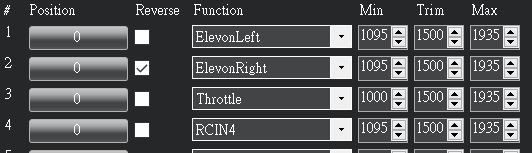
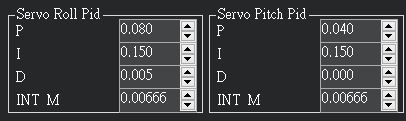
Hi, I use pixhawk cube orange+, and the version of Missionplanner is 1.3.77, ArduPlane is V4.3.0, and below are the parameter which I set.
Best to ask ArduPilot questions at discuss.ardupilot.org
1 Like
Ok! Thank you for answering!