Hey, we are a group studying robotics that would like to make our own position-control system with a Pixhawk-controlled drone.
The principle behind this is to make the Pixhawk control the motors, to ensure a stable flight, where our program would provide information to the drone to go either forward, backward, yaw rotation, etc.
We are currently struggling with the usage of Pymavlink, where we have managed to do the motor test through Python, and generally receive different internal data for the Pixhawk, but whenever we try to provide a takeoff command to the controller we always encounter a problem with the positioning system. Either an AHRS problem or a GPS problem.
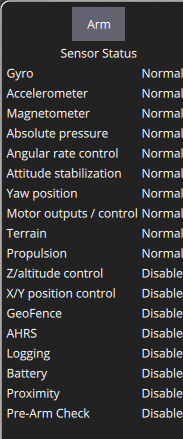
We have disabled all safety checks (just for the sake of testing), GPS, AHRS, geofence, etc (see sensor status image).
we currently have hands on both an Pixhawk-radiolink and a Cubepilot orange.
We are open to using other types of software if it can make our problem possible.
-Nejmann