Hi,
I am unable to start the subject VL53l0x distance sensor . The sensor is in the Px4 compiled list and I can run the command vl53l0x status and it says " Not running "
Attached a weblink for using from mavlink console .
Any help appreciated.
Hi,
I am unable to start the subject VL53l0x distance sensor . The sensor is in the Px4 compiled list and I can run the command vl53l0x status and it says " Not running "
Attached a weblink for using from mavlink console .
Any help appreciated.
Can you start it on the nuttx console?
vl53l0x start -X
If that doesn’t work, please run this command and share output:
i2cdetect
I will try this command and advice at the earliest…
do you have any further example how to register my sensor’s i2c address through the i2c command…i am not able to understand head and tail of that command list in px4 documentation…
thank you
Hi,
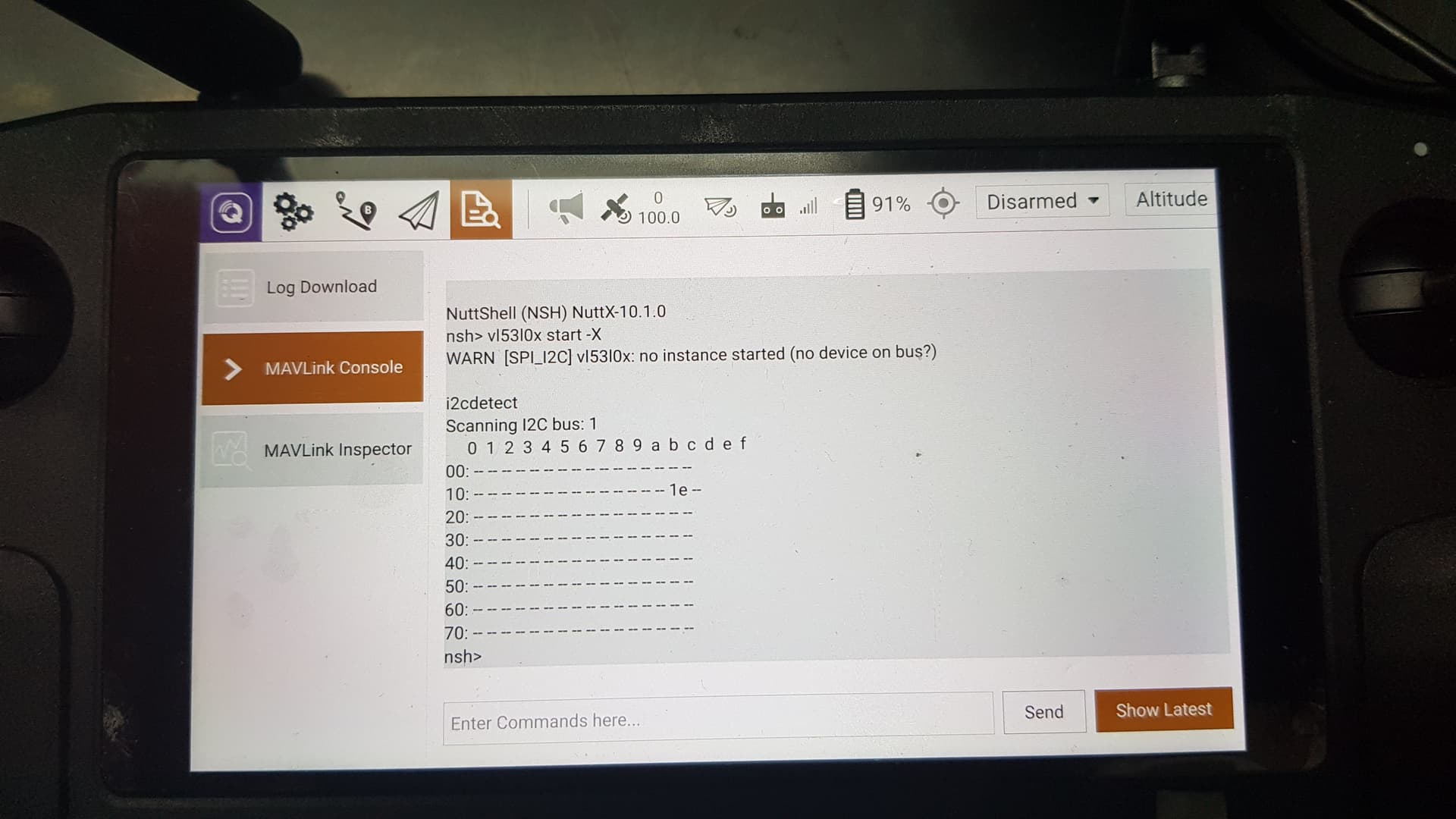
The output of both cmds with and without attaching the vl53l0x sensor to the i2c port of the Orange CUBE .
I am receiving the same output with the sensor attached and without the sensor attached
On my Herelink Radio Telemetry QGC version , i see that it does not show the " -a" option for setting i2c address but in the Px4 documentation, they have this parameter . I know for sure i2c address has to be set but how is the question again !!
VL53L0x sensor spec I2C: Up to 400 kHz (FAST mode) , serial bus Address: 0x52
QGC platform
Px4 stack v1.12.3 with NuttX- v10.1.0
Good Day,
I was able to start the VL53l0x sensor and it shows that it is connected to an i2c address. But now the issue is collision prevention and obstacle avoidance does not work !! While i enable obstacle avoidance, QGroundControl reports obstacle sensing not ready !!
Can you please advice what other parameters may i have to set to get this part going on a px4 Orange CUBE .