Hi,
I’m try to use Collision Prevention with OBSTACLE_DISTANCE message in PX4 v1.11
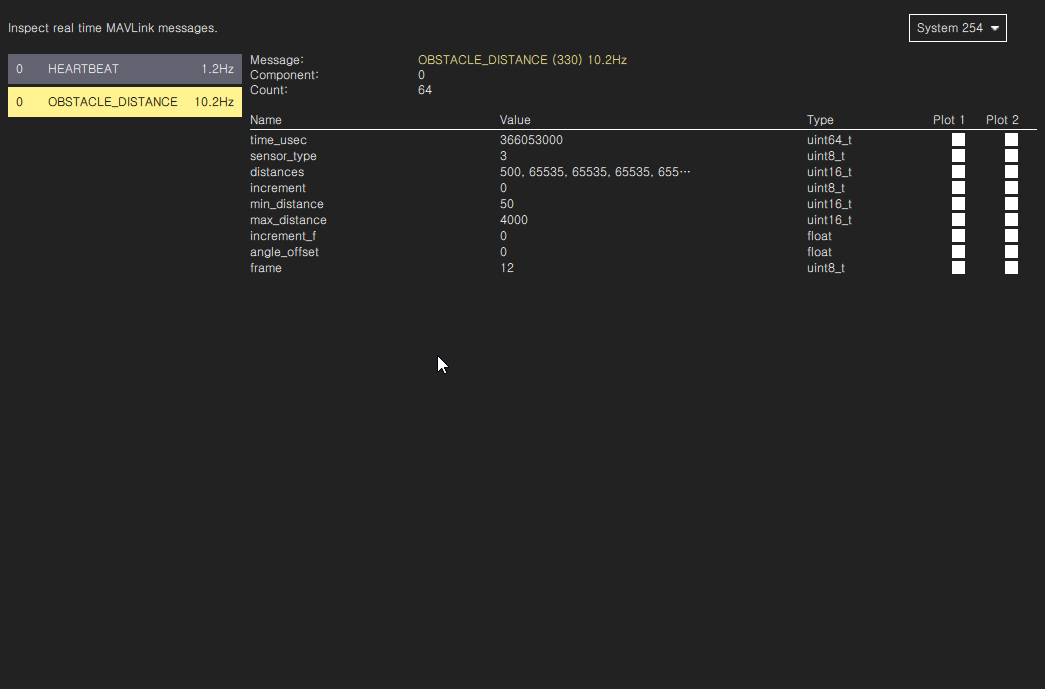
My custom board (System 254) sends OBSTACLE_DISTANCE dummy message and below is the message I received from QGC. (obstacle 5m, boresight)
Changed CP_DIST parameter to 3m and set to Position Mode.
However, muticopter can’t go forward
After changed CP_NO_DATA parameter to 1, muticopter can go except for the front direction.
Since I sent a higher value(5m) than CP_DIST(3m), I thought I should be able to fly forward, but I don’t know why.
Any help will be appreciated. Thanks.