Hello
I want to know when i use Qground control to set some waypoint :))
So the Trajectory set point for Position control are (x,y,z, vx,vy,vz ,acc) ???
Or when i use OFF board mode : I want drone follow this trajectory
pose.pose.position.x = rsin(theta);
pose.pose.position.y = rcos(theta);
pose.pose.position.z = 15;
So The Trajectory set point for Position control are (x_sp,y_sp ,z_sp, vx_sp,vy_sp,vz_sp ,acc_sp)? which vx_sp,vy_sp,vz_sp ,acc_sp is derive and double derive of x_sp,y_sp ,z_sp.
And other think
If i give a velocity set point so , the trajectory for Position control is V_sp and A_sp which A_sp is derive of V_sp .
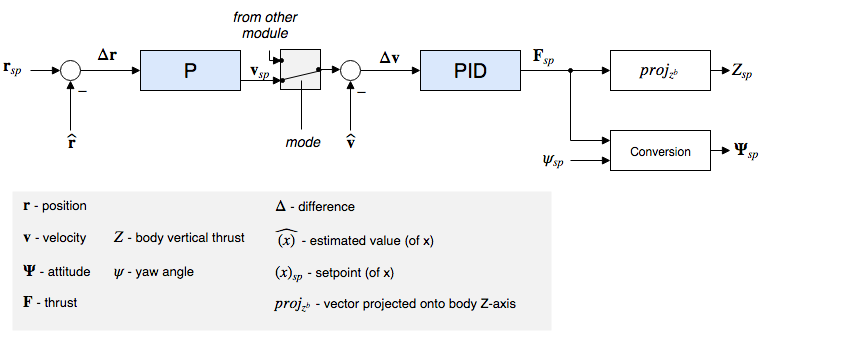
But when i see the diagramme above , i so confuse !!!
// Respects FlightTask interface, where NAN-set-points are of no interest
// and do not require control. A valid position and velocity setpoint will
// be mapped to a desired position setpoint with a feed-forward term.
// States and setpoints which are integrals of the reference setpoint are set to 0.
// For instance: reference is velocity-setpoint → position and position-setpoint = 0
// reference is thrust-setpoint → position, velocity, position-/velocity-setpoint = 0
Thanks