Hello PX4 community,
I’ve been working on a project called TinyLink, a lightweight LLM that translates natural-language instructions into MAVLink commands.
Some key highlights:
-
Runs 100% locally. No cloud or API keys needed
-
Works on modest hardware
-
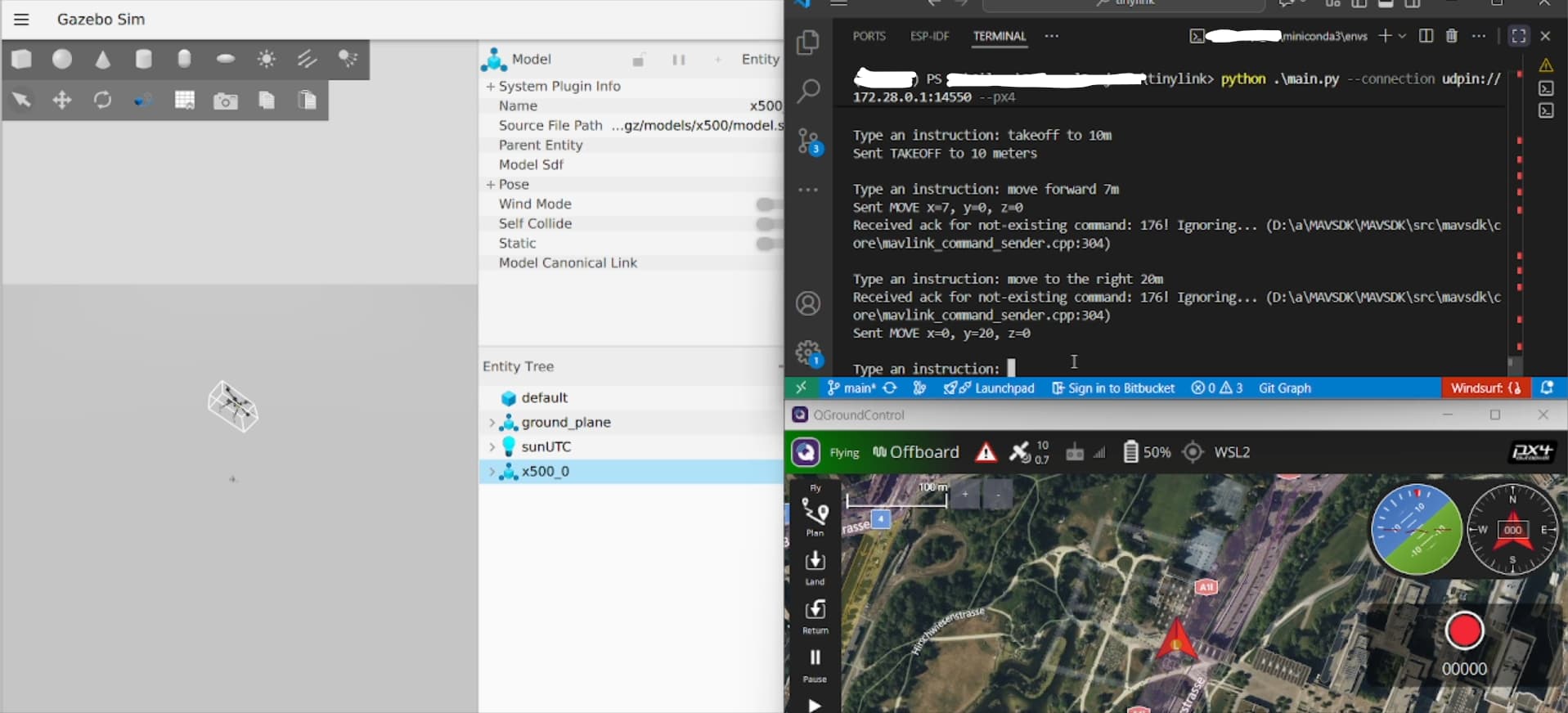
Supports Arm, Disarm, Takeoff, Land, Return to Home, Move (XYZ), and mode switching (e.g., Offboard)
-
Allows non-technical users or operators give natural language commands to control vehicles.
-
It’s not a full chat assistant. It’s just a clean, focused interface for supported commands.
Here’s the Github repo and a screenshot of a demo using PX4 & Gazebo SITL:
I’d appreciate to get your feedback. I’d like some advice on:
- Setup for running TinyLink on Raspberry Pi 5 with PX4 SITL/Gazebo on another PC
- QGroundControl integration
Thanks!