Hi @jlecoeur
Thanks for the answer.
you’re absolutely right on the toml coordinates and ratio mistakes !
well done !
As I consider tri conf prior to penta, the Ct ratio between C/R"unity" to turbine is 1/10. But it become 1/5 in penta conf (as I realise it’s better to integrate the 2 directions of C/R in the model).
Also, I understand the Ct/Cm should be constant to 1/20, I find a other bug in the turbine Cm… as you can see below
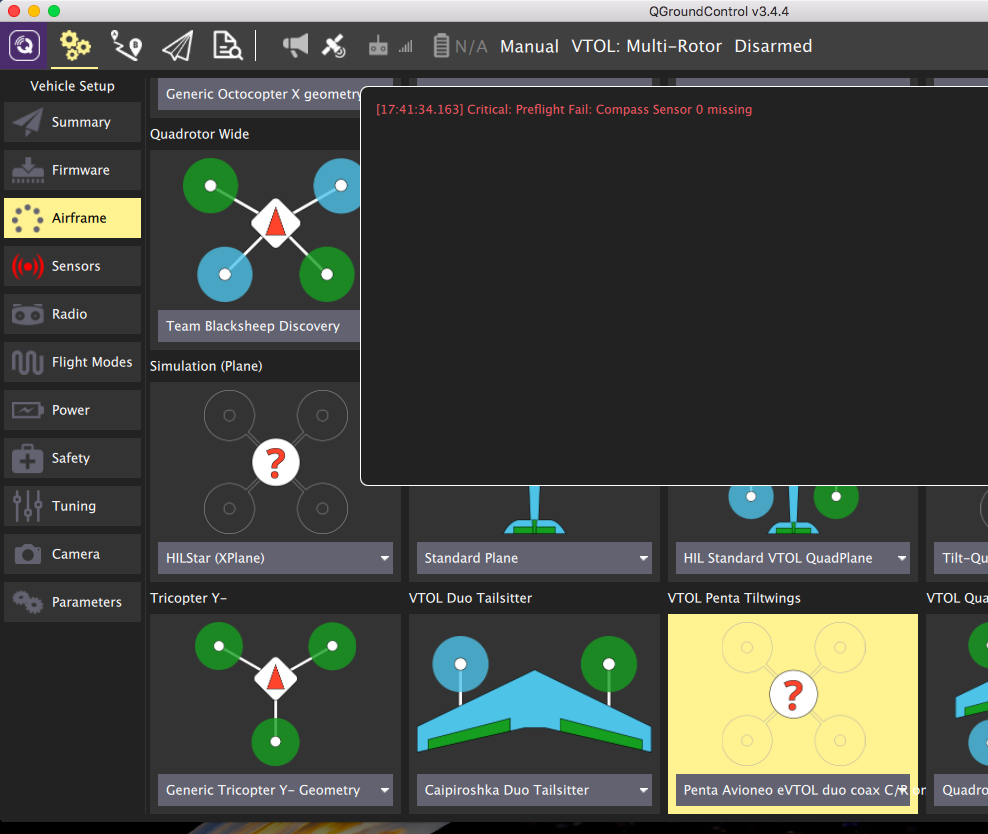
should we ad a VTOL Tiltror MAVTYPE 22 and param set VT_TYPE =3 ?
I’ll try and come back to you asap
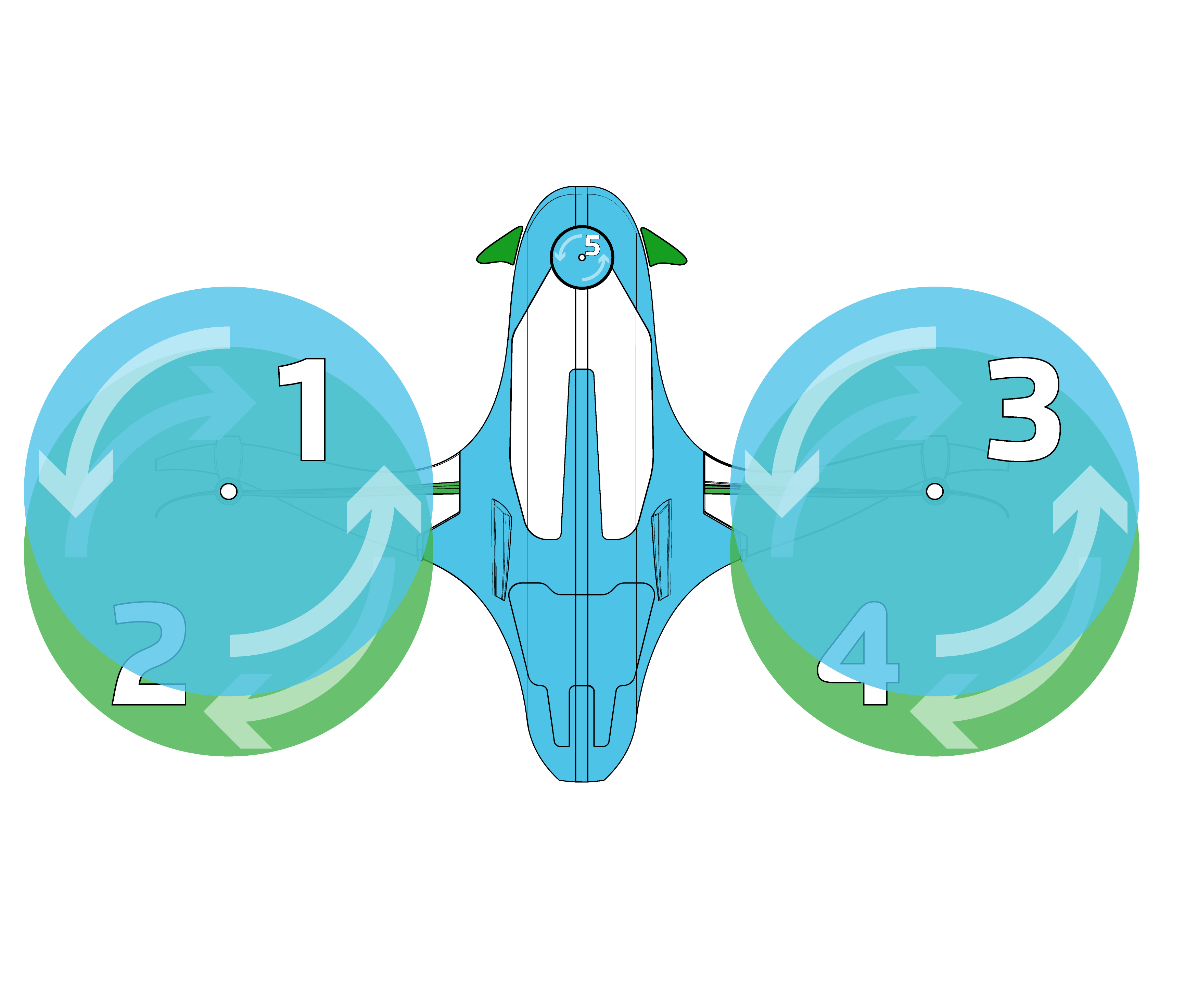
Penta Avioneo eVTOL duo coax C/R on dif tiltwings + light1/10 front pitch turbine
[info]
key = “5A”
description = “Penta Avioneo eVTOL duo coax C/R on dif tiltwings + light1/10 front pitch turbine”
[rotor_default]
axis = [0.0, 0.0, -1.0]
Ct = 0.5
Cm = 0.025
direction = “CCW”
[[rotors]]
name = “1-rear_righ_top”
position = [-0.02, 0.975, -0.2]
[[rotors]]
name = “2-rear_right_bot”
position = [-0.02, 0.975, -0.165]
direction = “CW”
[[rotors]]
name = “3-rear_left_up”
position = [-0.02, -0.975, -0.2]
[[rotors]]
name = “4-rear_left_bot”
position = [-0.02, -0.975, -0.165]
direction = “CW”
[[rotors]]
name = “5-front”
position = [0.7, 0.0, 0.09]
Ct = 0.05
Cm = 0.0025
#!nsh
@name Penta Avioneo eVTOL duo coax C/R on dif tiltwings + light1/10 front pitch turbine
@type VTOL Penta Tilt Wings# @class VTOL
@output MAIN1 motors right top
@output MAIN2 motors right bottom
@output MAIN3 motors left top
@output MAIN4 motors left bottom
@output MAIN5 front turbine
@output AUX1 Tilt servo
@output AUX2 Elevon right
@output AUX3 Elevon left
@output AUX4 Foil elevator
sh /etc/init.d/rc.vtol_defaults
if [ $AUTOCNF == yes ]
then
param set VT_IDLE_PWM_MC 1150
param set VT_ELEV_MC_LOCK 0
param set VT_MOT_COUNT 5
param set VT_TYPE 1
fi
set MIXER vtol_avioneo2
set PWM_OUT 12345
set MAV_TYPE 21