I’m using PX4 with Qgroundcontrol and I have some troubles with joystick. Firmware is ArduSub with Bluerov2 framework. When I test the motors numbered 5,6 they work perfectly fine by themselves but on the manual mode my vehicle doesn’t go up or down.

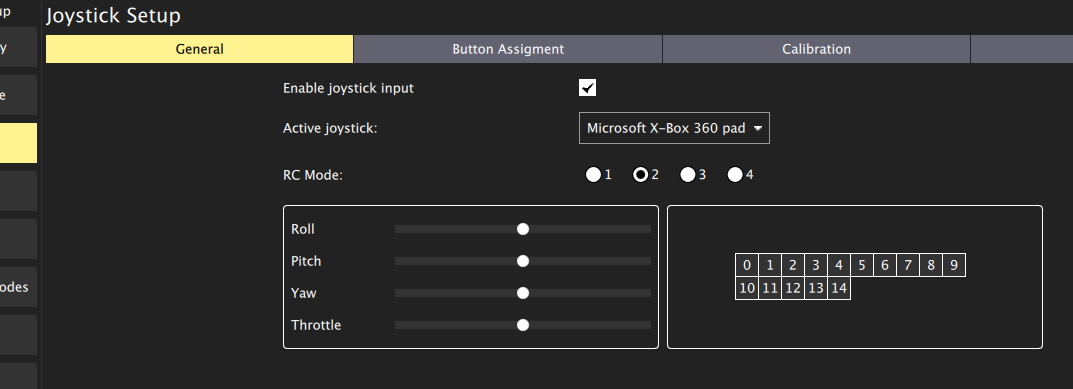
Also, even though I’ve done the calibration of the joystick, nothing changes with the sliders when I move two sticks on the general page of joystick setup.
I tried updating everything, I changed my joystick but nothing worked. I don’t have much time.
Any help would be appreciated.