Hi all,
While climbing to the set waypoint altitude after take-off, the Z setpoint does not follow the mission waypoint to 2 meters but drops down about half a meter to then slowly ramp up to the waypoint setpoint again. (around t = 3:25 - 3:27)
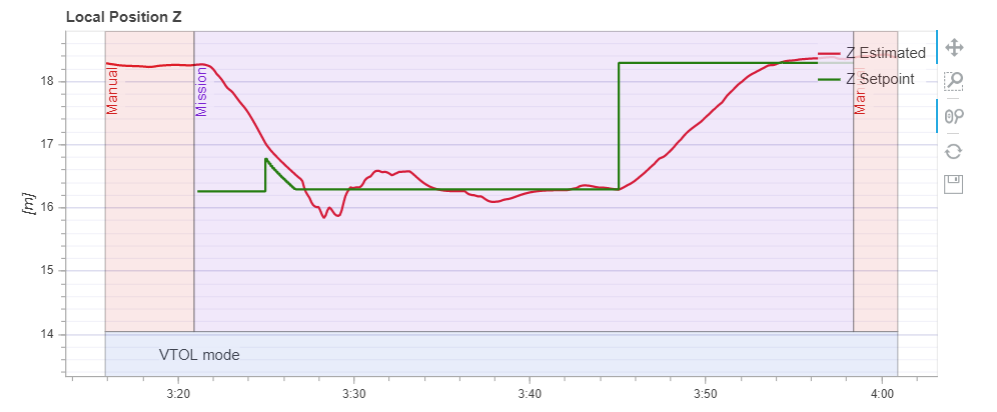
What process is determining the z-setpoint and how can i make the z-setpoint follow the waypoints as put in via Qgroundcontrol?
Log of the flight above:
https://logs.px4.io/plot_app?log=7a0e288b-e642-4ab2-8061-542db7650fef
Thanks in advance for the help.