Hi,
I would like your feedback on the following analysis.
Among the huge number of projects and forks, it is extremely difficult to get a clear idea of the activity and evolution of autopilot systems for UAV.
For this purpose I made a survey of the main open-source autopilots based on an automatic analysis of their source code repository (more info in my phd thesis here, p. 23).
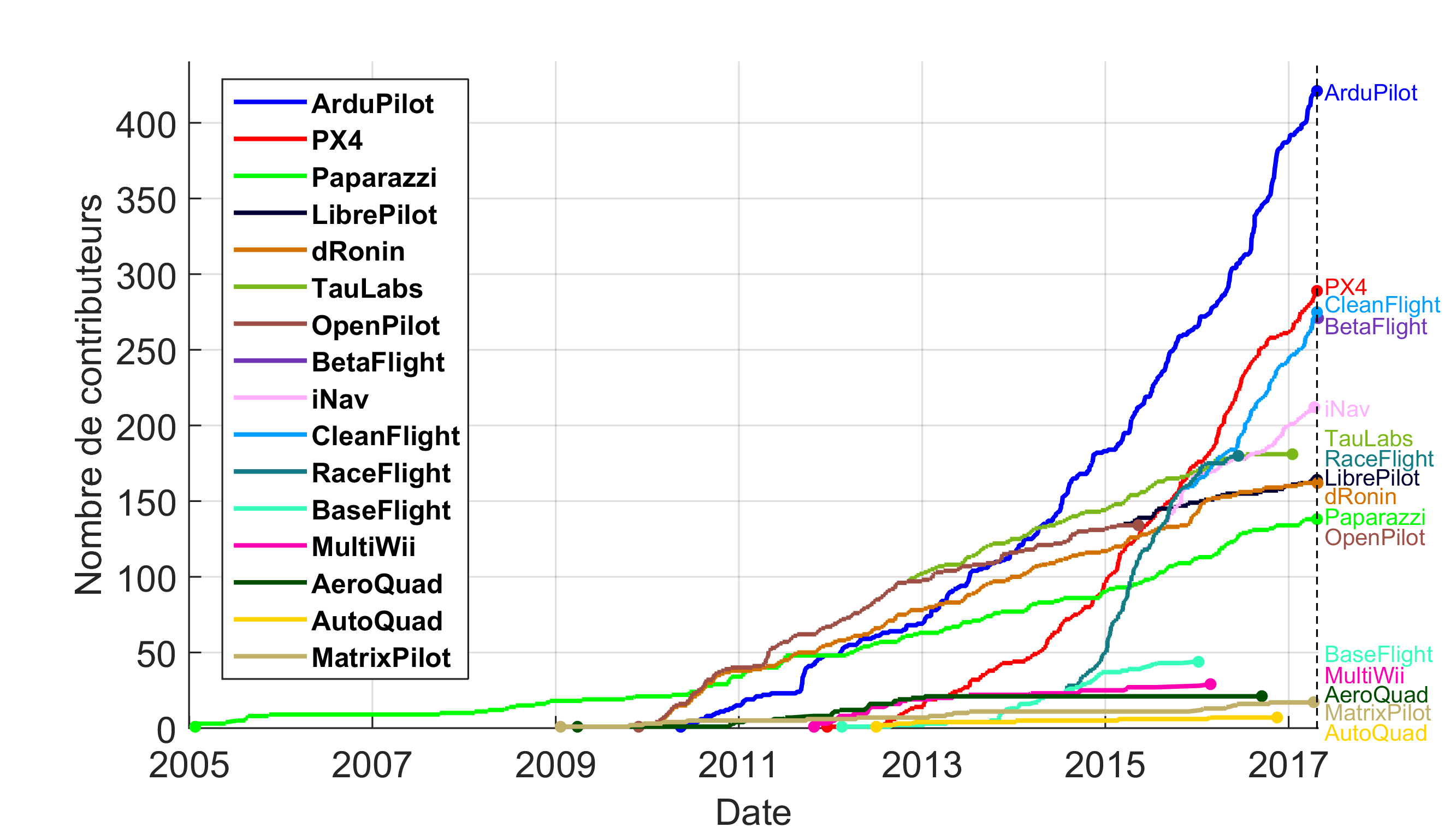
For example, here is the evolution of the number of contributors:
… and the number of commit per week (mean filter with 6 months sliding window):
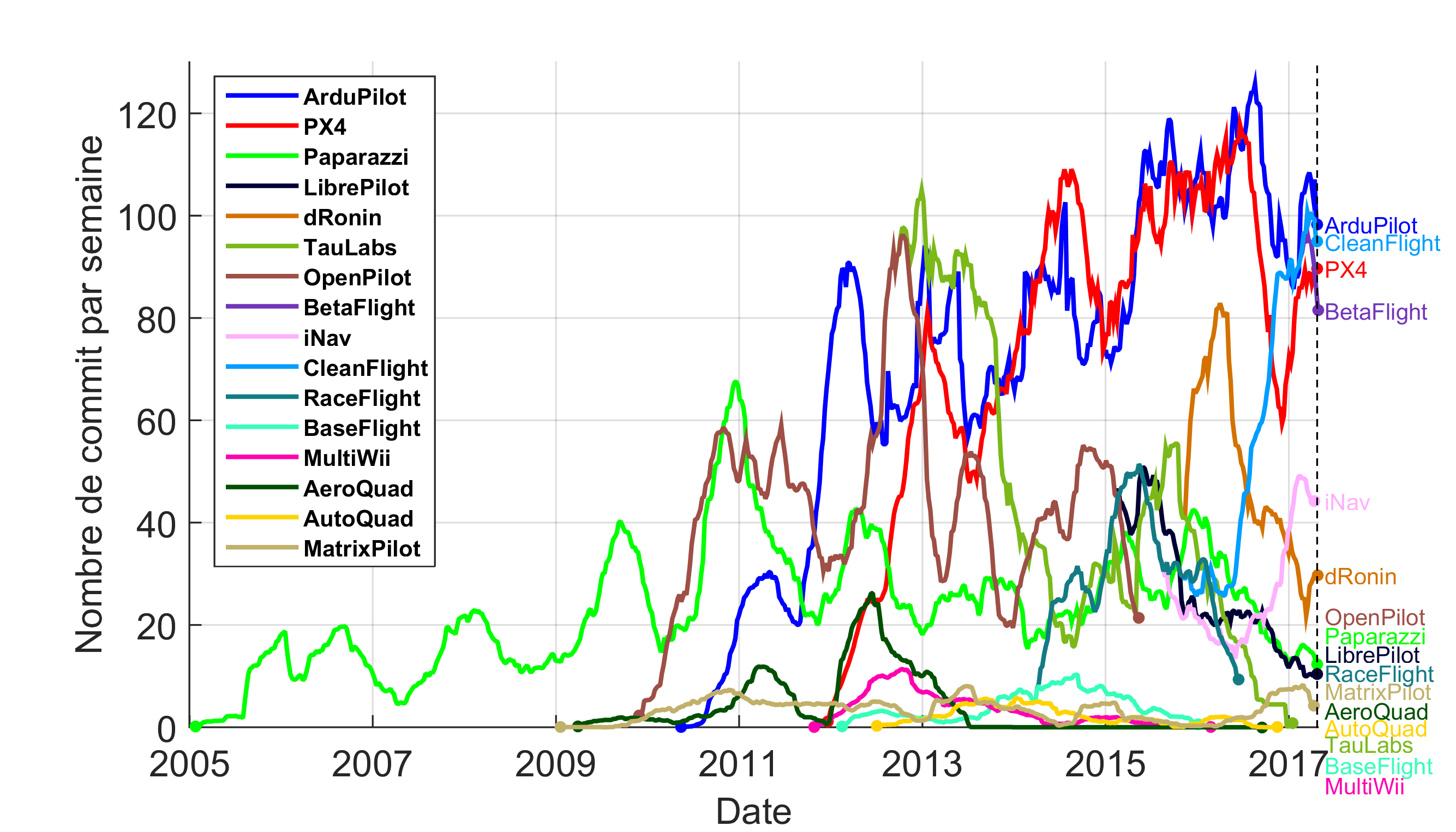
On the figures we can see the last update date of the projects (thus if they are discontinued or not), the general trends, the forks (see e.g. how the cleanFlight fork of Raceflight has evolved, itself a fork of baseflight…), etc.
The questions are:
- Does that spark your interest?
- Would you like to see a website were one can see these figures automatically updated, compare projects, add code repositories, etc. ?
- If yes what would be your suggestions?
Thanks!
