Hey,
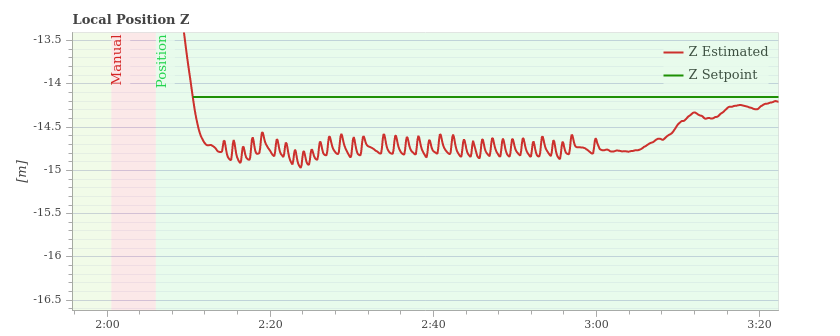
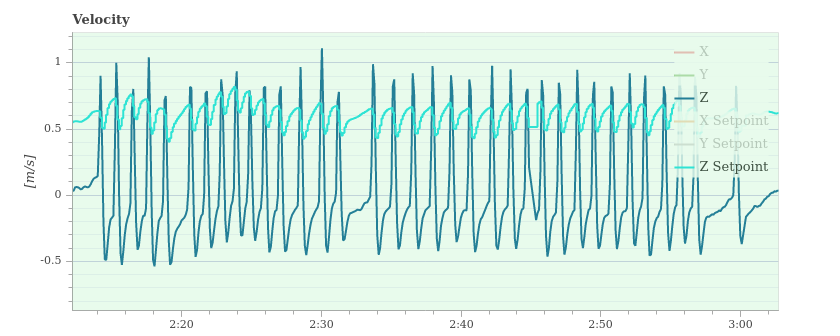
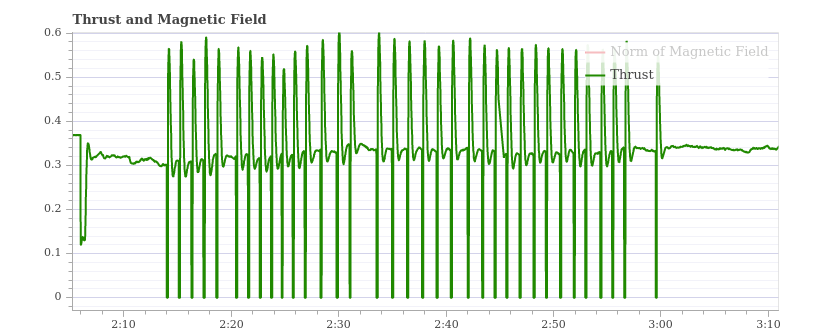
I recently took over a drone project at work. We are using a Pixhawk 4 and PX4 V1.9. We are currently experiencing a problem with pumping motions in Position Hold. The Motion starts with a complete loss of Input Throttle, after that it tries to go back and then it starts from the beginning. Sometimes it stabilizes after 3 repititions, sometimes after 20. Is this a PID-tuning problem? And if so, do I have to adjust the P Gains of MC_ROLL_P etc.? Or is this a complete different problem? I would be really happy for some advice. Thank you!
i am also facing the same issue , can you help me to solve if you figure it out