Hello,
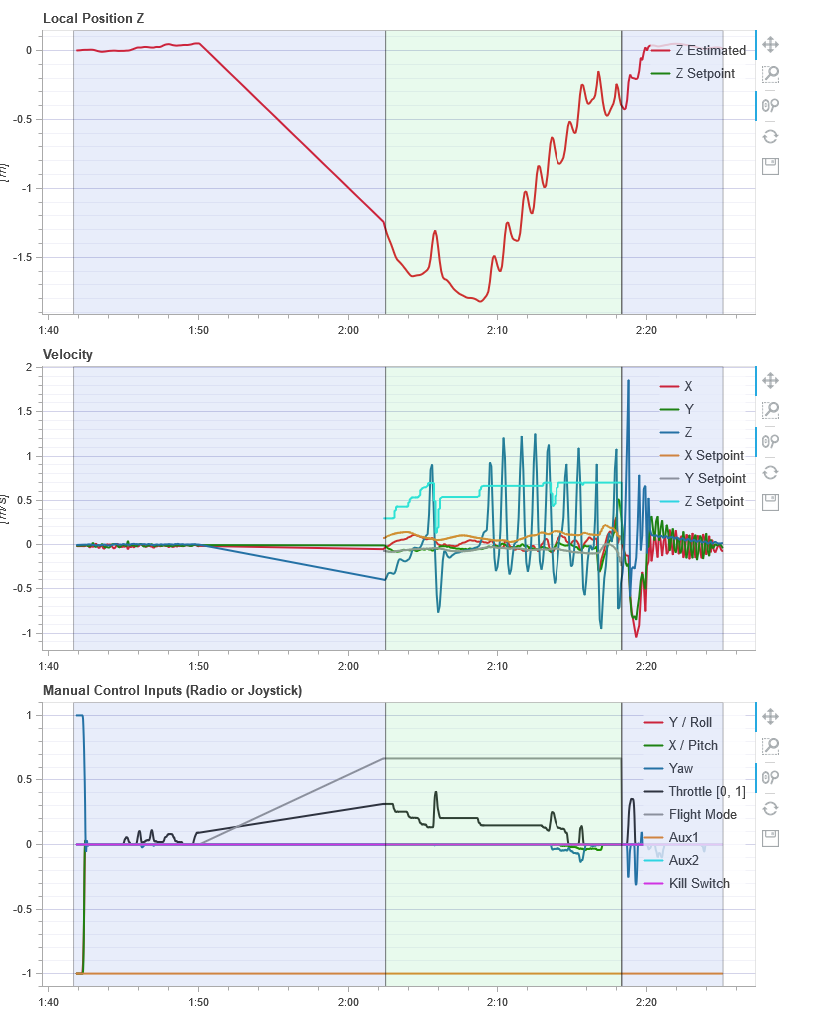
I have a very stable drone in stabilized mode but very stong thrust oscillations in attitude and position mode, I’ve almost lost my drone with that.
Can you help?
MY setup:
Frame : large hexa copter
Motor : Hobbywing X6 FOC
FCU : pixhawk 4 + GPS-RTK
TX/RX futaba FX22
The logs are available here:
postition : https://logs.px4.io/plot_app?log=d1c485bf-c83f-4737-9efa-e69d25cc9812
attitude : https://logs.px4.io/plot_app?log=30435e8d-3d46-4430-9417-1b3bafb9934f
Bests.