Hello everybody,
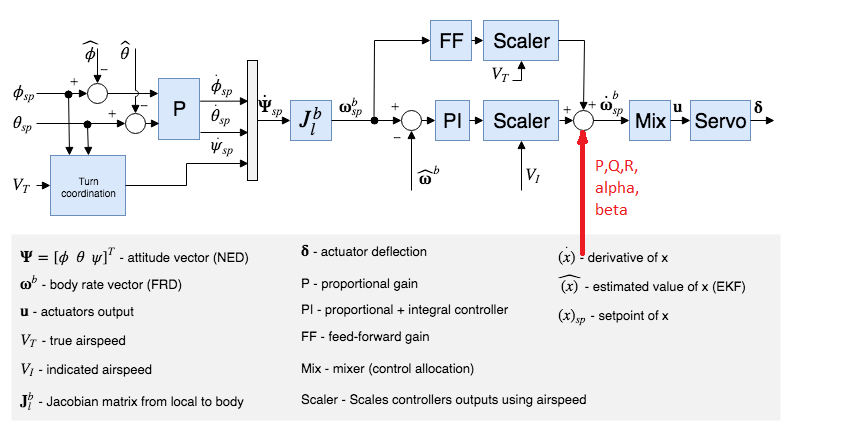
I am working on a Master’s project to design a rate controller for a fixed wing RC aircraft using the pixhawk controller architecture. I want to feedback rate signals, sideslip angle and angle of attack inside the rate tracking loop so that the rate tracking loop (outer loop in this case) will have an inner loop in addition.
However, I could not find a SAS architecture in the literature nor the PX4 documentations.
Do I have to use a custom architecture or can it be done in the current architecture with small adjustments?
I am new to pixhawk and I would really appreciate it if someone could explain.
Thank you in advance.