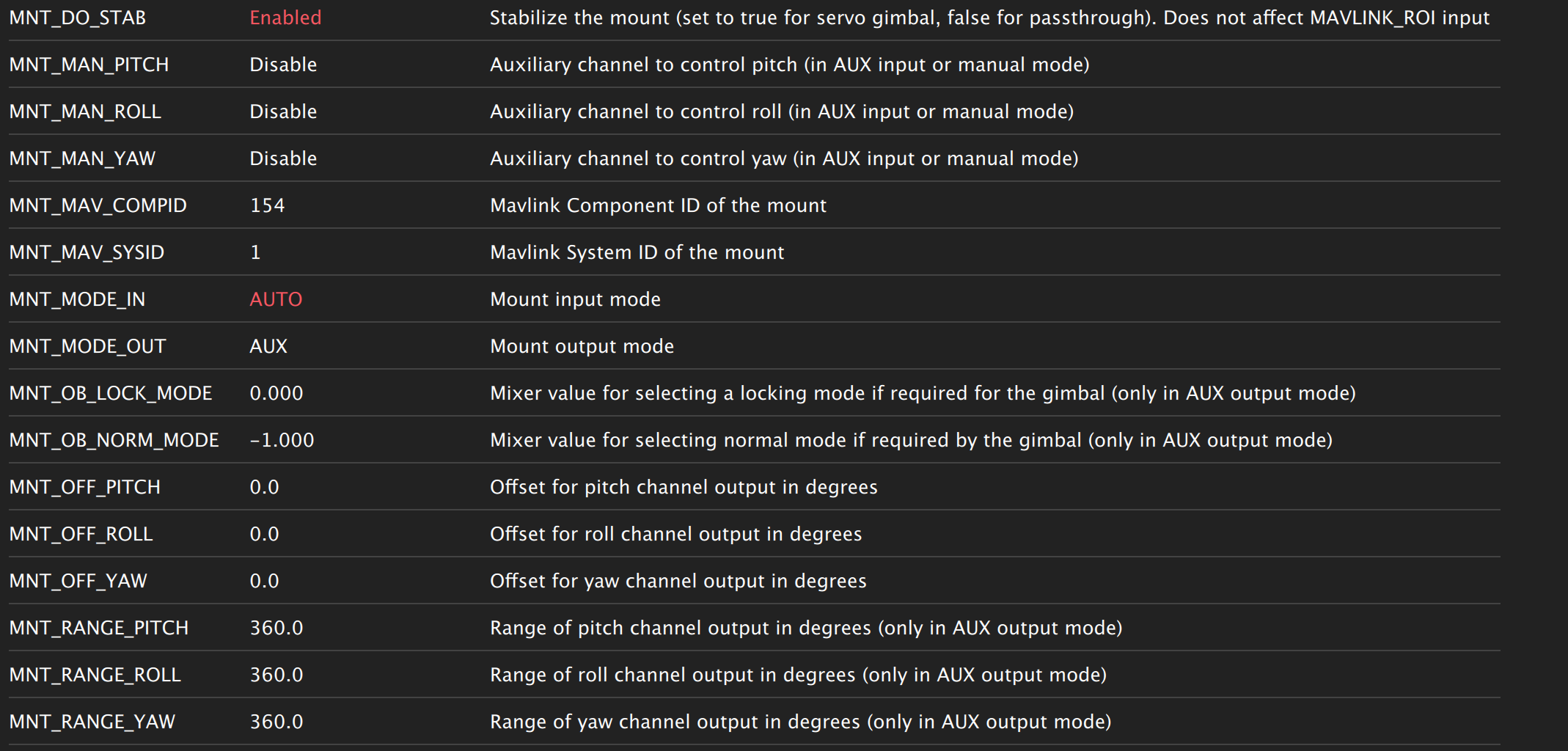
Hi, im using px4 1.8.0 at PX4_FMU_v2, Im trying to figure out how to stabilize a simple 1-axis (Pitch) servo gimbal using MNT params, but without success…
may try to MNT_MODE_IN to RC. In AUTO you need a large Stick Motion to react.
We also use a servo for PITCH Control. But i have the issue, that PWM is changing his value to lowest, when Pitch-Servo reach maximum end position in stabilizing mode. Vice versa same, PWM is changing to maximum, when Pitch-Servo reach minimum end position. In ROLL Control we do not have this problem.
Does anyone knows this effect and heve a solution for it?