Is it possible to generate smooth S curve reference trajectories for yaw control in position mode?
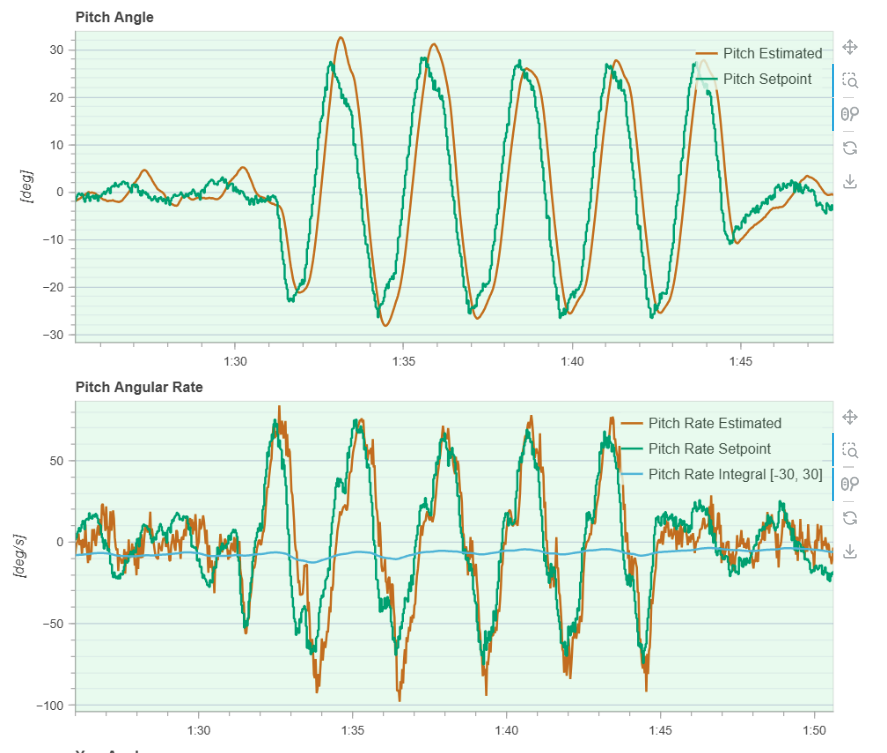
I am having problems with my large drone that quick yawrate changes causes unwanted instability. Hence I have tuned down maximum yawrate to 40deg/s and downtune yaw controller PIDs.
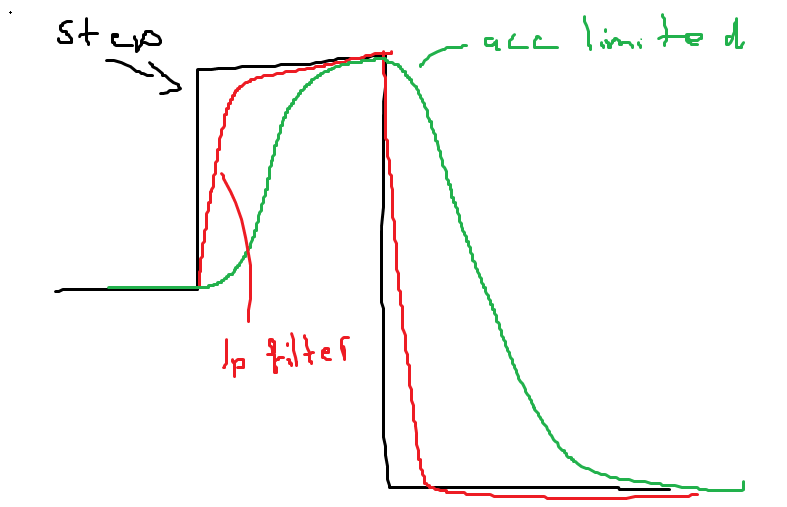
For pitch and roll (in position mode) the setpoints are acceleration limited (MPC_POS_MODE = acceleration limited) meaning the pitchrate/rollrate setpoints are smooth (S curve style), like this:
For the yaw I am not observing this S smoothing but only a first order low pass filter due to MPC_MAN_Y_TAU parameter, see below. This only helps a little since it will still cause large instantaneous yawrates at the beginning of a commanded yaw due to LP filter response shape.
Is it possible to have S curve smoothing on yaw aswell? I think this would greatly improve yaw performance.