Hello I recently began a project using a Pixhawk 4 mini and a raspberry pi zero as a companion computer. I would like to control the pixhawk (quadcopter) with the raspberry pi over the telemetry port & Mavlink protocol. I’m gonna write a program in python for the RPI.
My problem is QGroundControl says Radio setup is required prior to flight and doesn’t give me the option the test the motors.
So does the pixhawk required a radio transmitter/receiver to even be set up in the first place? If this is the case the pixhawk4 mini only has 1 telem port.
Hi @andrewlax97, did you ever figure this out? I am attempting to do something similar.
Hi,
The Pixhawk 4 mini has serial Tx and Rx pins. This can be connected to your raspberry pi and then you can communicate with px4 autopilot software from the raspberry pi.
Mavlink has a command based program you can use to test and send commands to Pixhawk. You can test your motors this way. Or if you have blheli ESC’s you can use blheli software to test motors.
I used the Drone kit python library, it uses mavlink communication protocol to talk to the Px4 software. I used this to write an application on the raspberry pi and another app on my windows pc. I set up an ad hoc wi-fi connection between them and could control the drone from a python app on my pc.
So you don’t need a controller to make the drone fly. But developing an app which controls a dangerous quad was a bad idea and i got a controller for testing and safety when the quad lost control
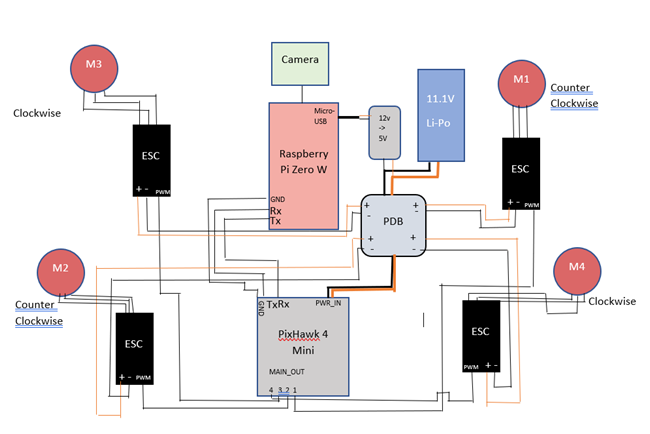
Here’s how i setup the connections on the drone.
Thanks for replying. So basically you just ignored the radio setup and used Mavlink messages to control the drone in the way you wanted?
Yeah exactly. It should still respond to mavlink commands.
I checked my notes, I actually used ArduPilot instead of Px4. I found more support forums and documentation for it.