Hello everyone,
I’m a M.S. candidate studying UTM.
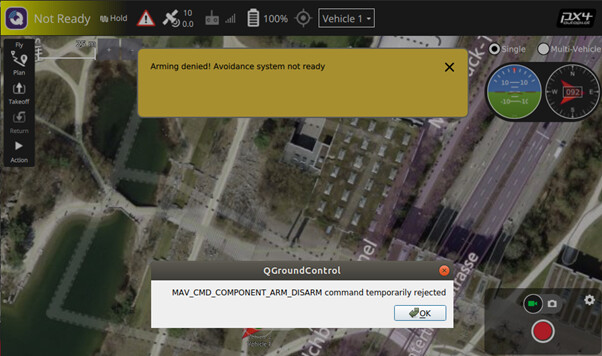
I’d like to simulate with many drones flying avoiding collisions each other.
I already done the Obstacle and Detection Avoidance tutorial and Multi-vehicle simulation in gazebo, Rviz and QGC.
I think I need to adjust the parameter “COM_OBS_AVOID” to proceed with this simulation.
I installed Mavros to solve this problem and tried googling, but it wasn’t easy to solve.
Thank you in advance.