Hi,
I’m trying to use the “Collision Avoidance” feature in use of companion computer. The system is following this,
- PX4 1.14.0
- MAVSDK 2.2.0
- WSL / gz_x500
- QGC 4.3.0
This is my message injection code
void CollisionAvoidance::run()
{
int64_t now_ms = Utils::TimeSinceEpochMs();
int64_t epo_ms;
// for stabilization delay
std::this_thread::sleep_for(std::chrono::milliseconds(500));
std::random_device rd;
std::mt19937 rg(rd());
MSG::ObstacleDistance obstacle_distance;
std::uniform_real_distribution<float> dist(0.f, 2.f);
for (; not _thread->interruption_requested();)
{
epo_ms = now_ms;
std::this_thread::sleep_for(std::chrono::milliseconds(EVERY_RUN_MS - (now_ms - epo_ms)));
now_ms = Utils::TimeSinceEpochMs();
for (int n = 0; n < OBSTACLE_DISTANCE_SECTION; n++)
{
obstacle_distance.distance_m_[n] = 25.f + dist(rg);
}
obstacle_distance.inc_deg_ = 5.f;
obstacle_distance.min_dist_m_ = 1.f;
obstacle_distance.max_dist_m_ = 100.f;
ObstacleDistanceUpdated(obstacle_distance);
}
}
bool ObstacleDistanceReceived(ObstacleDistance& obstacle_distance)
{
/// 10Hz maybe
uint16_t distances_cm[OBSTACLE_DISTANCE_SECTION];
uint16_t min_distance_cm = static_cast<uint16_t>(obstacle_distance.min_dist_m_ * 100.f);
uint16_t max_distance_cm = static_cast<uint16_t>(obstacle_distance.max_dist_m_ * 100.f);
for (int n = 0; n < OBSTACLE_DISTANCE_SECTION; n++)
distances_cm[n] = static_cast<uint16_t>(obstacle_distance.distance_m_[n] * 100.f);
auto result = _passthru->queue_message([&](MavlinkAddress address, uint8_t channel) {
mavlink_message_t message;
mavlink_msg_obstacle_distance_pack_chan(
address.system_id,
address.component_id,
channel,
&message,
Utils::TimeSinceEpochUs(),
MAV_DISTANCE_SENSOR_LASER,
distances_cm,
0,
min_distance_cm,
max_distance_cm,
obstacle_distance.inc_deg_,
0.f,
MAV_FRAME_BODY_FRD
);
return message;
});
return result == mavsdk::MavlinkPassthrough::Result::Success;
}
Here is my QGC.
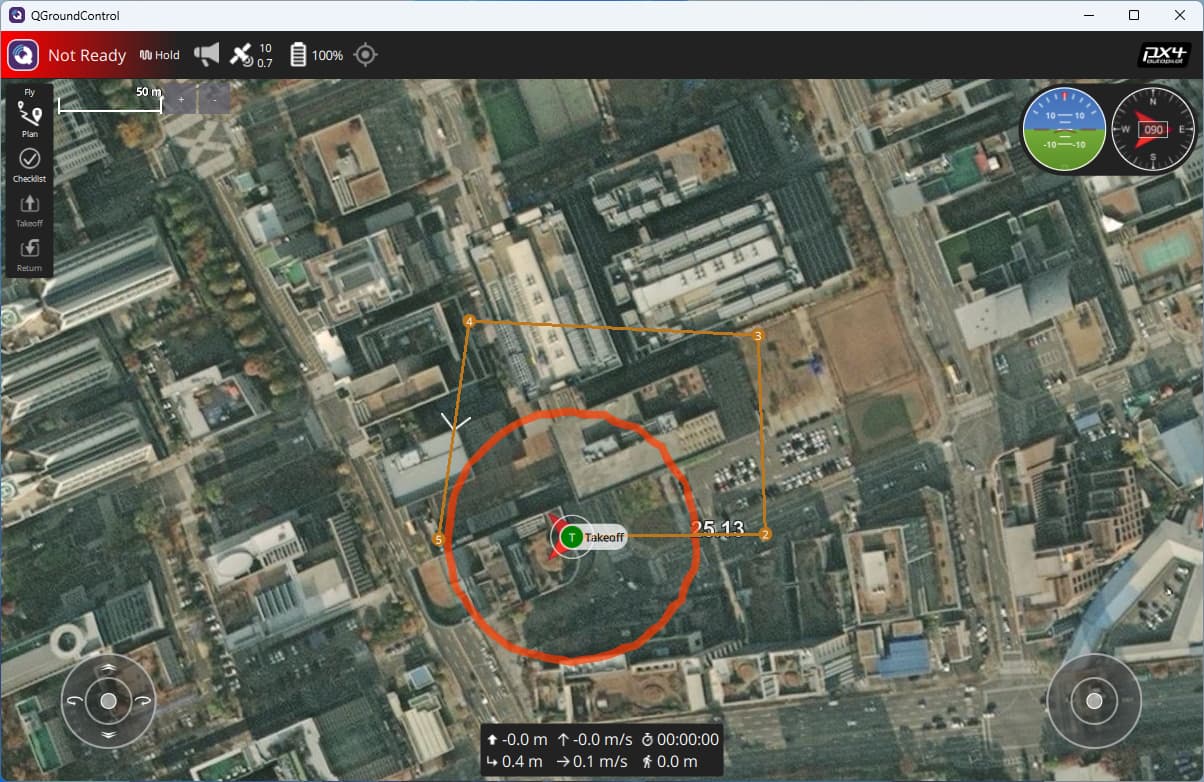
In “Arming Check Report:”
Avoidance system not ready
My setup of “Safety” are,
- Collision Prevention : “Enabled”
- Obstacle Avoidance : “Enabled”
- Minimum Distance : 10
Here is MAVLink Inspector
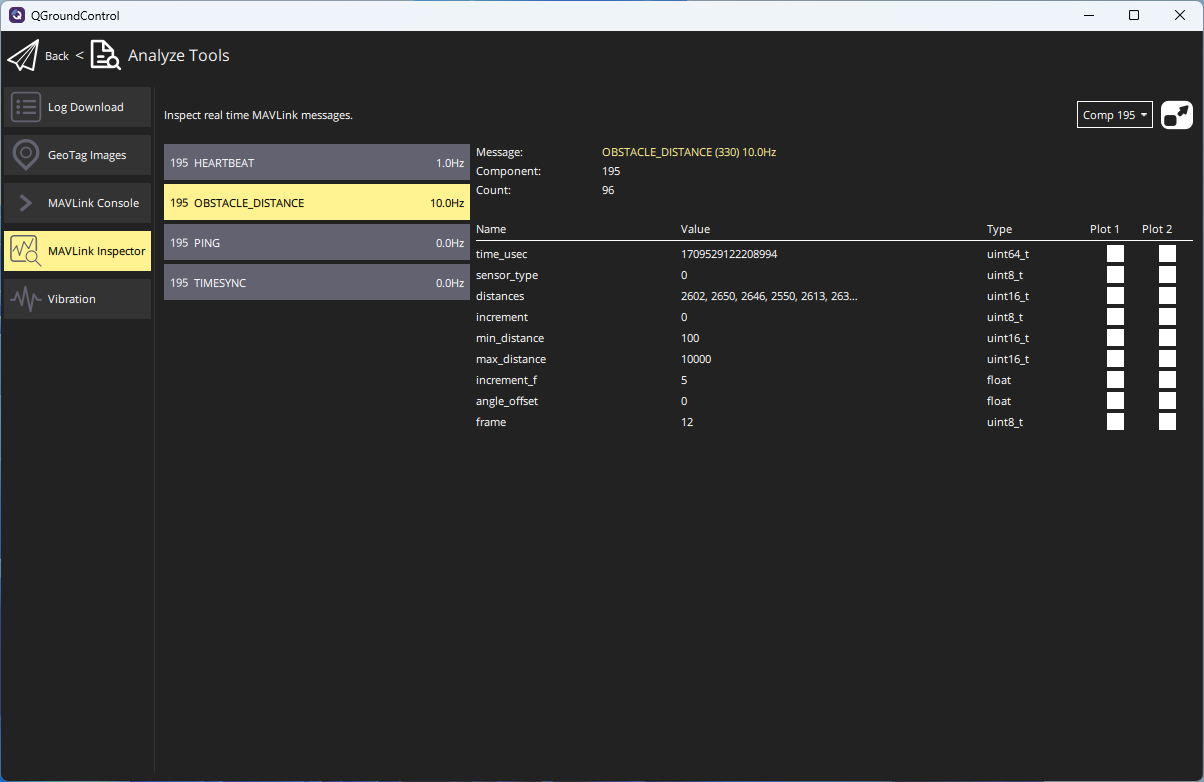
What is my missing?