Hi Guys,
I have a question about MavLink and the debug port of the pixhawk 4 mini: I would like to connect a Raspberry Pi via the debug-port with a pixhawk 4 mini to send missions from the raspberry to px4 via MAVSDK. Since all other UART-ports are already in use at the pixhawk, i need to use the debug port.
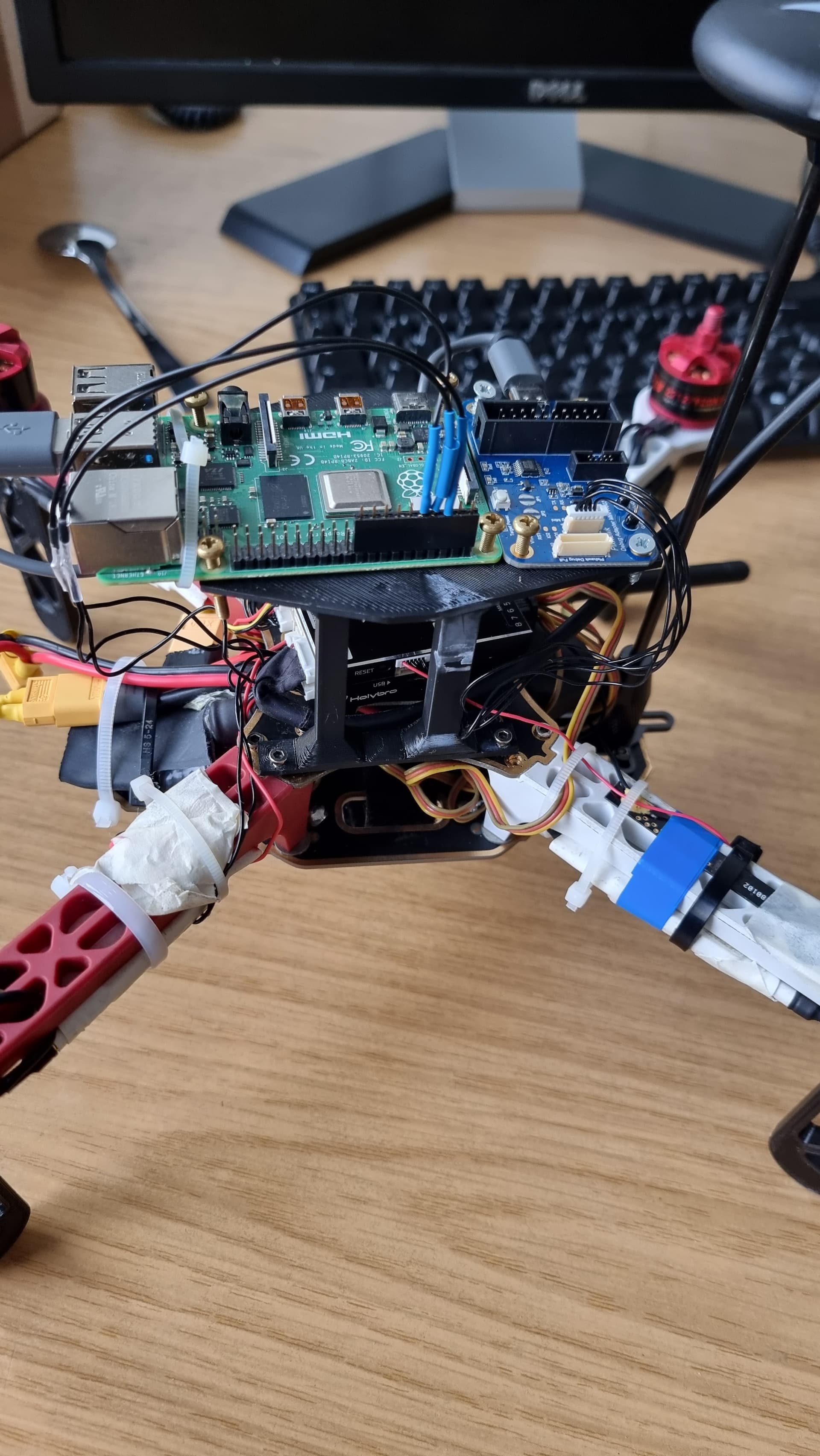
For that I bought the pixhawk debug adapter and connected it to the pixhawk. Via usb-cable i connected the debug-adapter with the raspberry. Furthermore I cuted the read via (GND) from the 6 pin connector between debug-adapter and pixhawk, since with the wire present, the Raspberry wouldnt run stable.
I activated the Mavlink-module to listen on /dev/ttyS5 in px4.
When i try to send a mission from the Raspberry to the pixhawk i get the following output:
[09:22:56|Info ] MAVSDK version: v1.4.17 (mavsdk_impl.cpp:20)
Waiting to discover system…
[09:22:57|Debug] New: System ID: 1 Comp ID: 1 (mavsdk_impl.cpp:496)
[09:22:57|Debug] Component Autopilot (1) added. (system_impl.cpp:377)
[09:22:57|Warn ] Vehicle type changed (new type: 2, old type: 0) (system_impl.cpp:225)
[09:22:57|Debug] Discovered 1 component(s) (system_impl.cpp:578)
Uploading mission…
[09:22:58|Warn ] sending again after 0.507569 s, retries to do: 3 (512). (mavlink_command_sender.cpp:287)
[09:22:58|Warn ] sending again after 0.508156 s, retries to do: 3 (520). (mavlink_command_sender.cpp:287)
[09:22:58|Warn ] sending again, retries to do: 3 (CAL_GYRO0_ID). (mavlink_parameters.cpp:1291)
[09:22:58|Debug] Falling back to gimbal protocol v1 (mission_impl.cpp:124)
[09:22:59|Warn ] sending again after 1.01415 s, retries to do: 2 (520). (mavlink_command_sender.cpp:287)
[09:22:59|Warn ] sending again after 1.01454 s, retries to do: 2 (512). (mavlink_command_sender.cpp:287)
[09:22:59|Warn ] sending again, retries to do: 2 (CAL_GYRO0_ID). (mavlink_parameters.cpp:1291)
[09:22:59|Warn ] command denied (512). (mavlink_command_sender.cpp:191)
[09:22:59|Warn ] sending again, retries to do: 3 (CAL_ACC0_ID). (mavlink_parameters.cpp:1291)
[09:22:59|Warn ] sending again after 1.52004 s, retries to do: 1 (520). (mavlink_command_sender.cpp:287)
[09:23:00|Warn ] sending again, retries to do: 2 (CAL_ACC0_ID). (mavlink_parameters.cpp:1291)
[09:23:00|Warn ] sending again, retries to do: 1 (CAL_ACC0_ID). (mavlink_parameters.cpp:1291)
[09:23:01|Error] Error: Retrying failed get param busy timeout: CAL_ACC0_ID (mavlink_parameters.cpp:1320)
[09:23:01|Error] Error: Param for accel cal failed. (telemetry_impl.cpp:1580)
[09:23:01|Warn ] sending again, retries to do: 3 (CAL_MAG0_ID). (mavlink_parameters.cpp:1291)
[09:23:01|Warn ] timeout: retries exceeded (mavlink_mission_transfer.cpp:535)
It was told to me, that this output means, that MAVSDK receives message from the drone, but the drone doesnt receive messages from MAVSDK. So it seems like the debug adapter does not forward the mesages properly. Does someone had a similar issue and has an idea how to solve the communication issue?