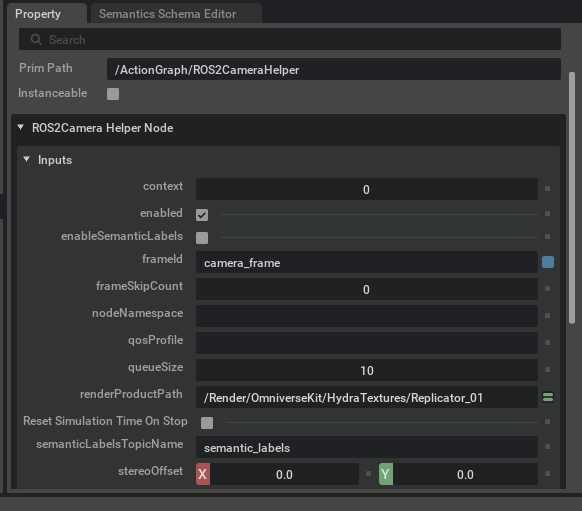
I am using pegasus Simulator to simulate a px4 iris in Isaacsim and am publishing camera topics through the isaac ros node(ros2 humble) . However when i try to connect through mavros through a UDP connection from another system , Once i subscribe to the image topic it slows down the simulation drsastically , any workarounds around this ? The network i used to send these messages had no other traffic other than these messages . These are the ros2 camera helper parameters will changing anything here work ?
Related topics
| Topic | Replies | Views | Activity | |
|---|---|---|---|---|
| ROS2 Performance Degrades w/ Multiple Vehicles | 4 | 60 | December 18, 2024 | |
| Subscriber node callback not triggering from simulator messages but manually sending with ros2 topic pub works? | 2 | 392 | January 14, 2024 | |
| Mavros topics on ROS giving super high and fake publish frequencies | 0 | 330 | January 14, 2022 | |
| Unexpected topic ID when starting micrortps agent | 2 | 1496 | July 21, 2022 | |
| Huge Control Delay in Offboard Mode with ROS2 RTPS | 7 | 1178 | September 24, 2024 |