Hi Daneil,
Yes I have hippocampus + uuv_att_control app running, but I used the headless mode, which will not show the GUI of the gazebo. Because I used the Ubuntu to run the simulation, it would be deadly slow once the gazebo GUI was started.
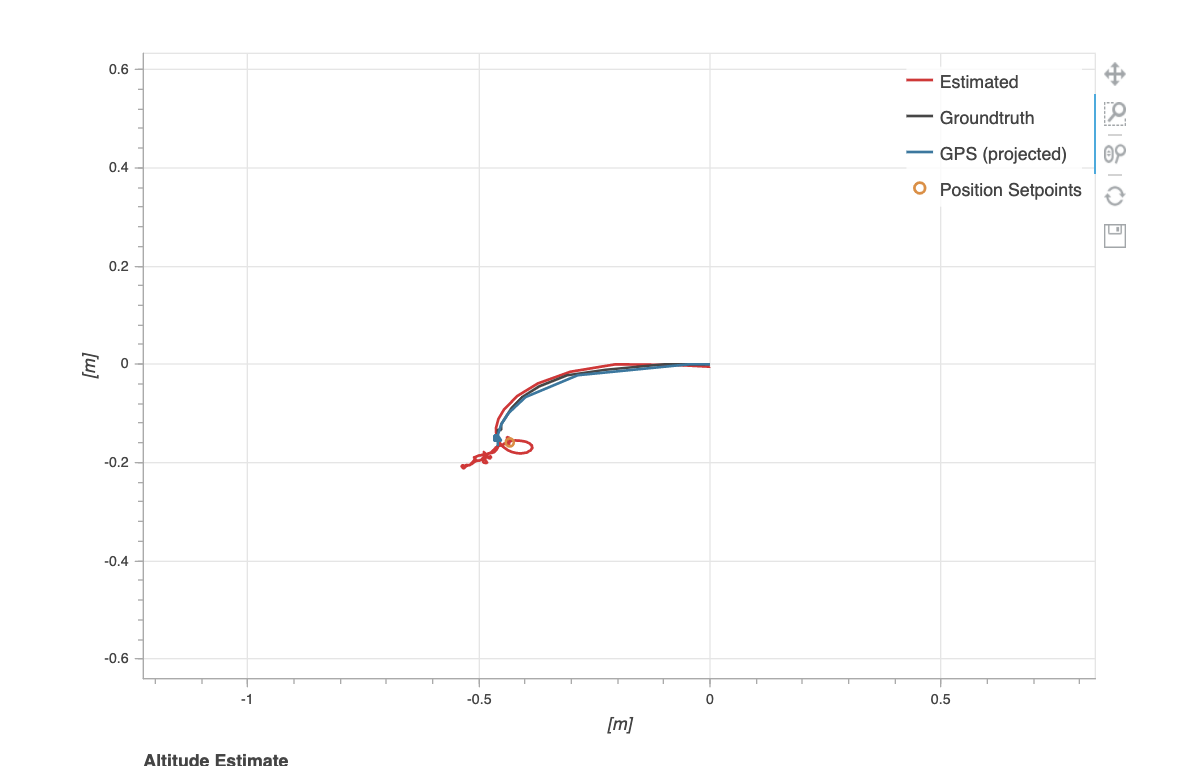
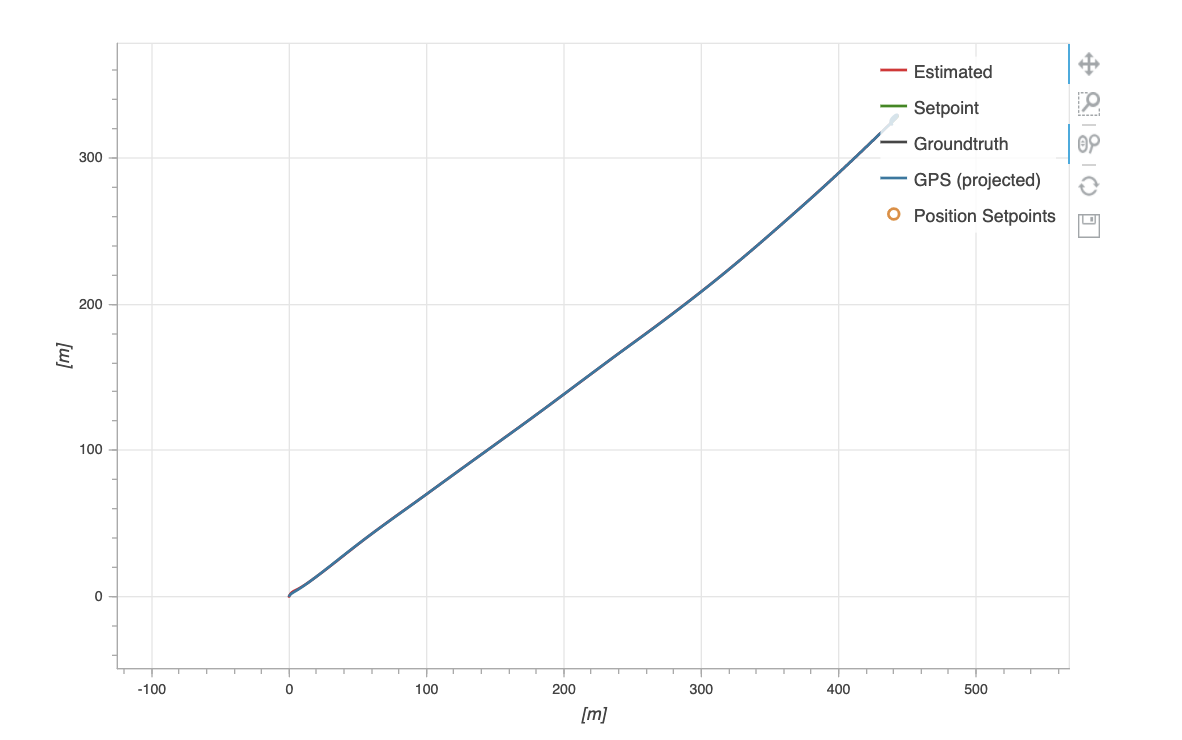
I just tried the following script and log the whole process. I checked it’s trajectory in the online PX4 log reviewer and found everytime the uuv just returned home, and couldn’t go further(like go straight with the set attitude) even if I prolong the mission time.
from future import division
PKG = ‘px4’
import rospy
from geometry_msgs.msg import Quaternion, Vector3
from geometry_msgs.msg import PoseStamped
from mavros_msgs.msg import AttitudeTarget
from mavros_test_common import MavrosTestCommon
from pymavlink import mavutil
from six.moves import xrange
from std_msgs.msg import Header
from threading import Thread
from tf.transformations import quaternion_from_euler
class MavrosOffboardAttctlTest(MavrosTestCommon):
“”"
Tests flying in offboard control by sending attitude and thrust setpoints
via MAVROS.
For the test to be successful it needs to cross a certain boundary in time.
"""
def setUp(self):
super(MavrosOffboardAttctlTest, self).setUp()
self.att = AttitudeTarget()
self.local_pos_ini = PoseStamped()
self.att_setpoint_pub = rospy.Publisher(
'mavros/setpoint_raw/attitude', AttitudeTarget, queue_size=1)
self.local_pos_pub = rospy.Publisher('mavros/local_position/init', PoseStamped, queue_size=1)
# send setpoints in seperate thread to better prevent failsafe
self.att_thread = Thread(target=self.send_att, args=())
self.att_thread.daemon = True
self.att_thread.start()
def tearDown(self):
super(MavrosOffboardAttctlTest, self).tearDown()
#
# Helper methods
#
def send_att(self):
rate = rospy.Rate(10) # Hz
self.att.body_rate = Vector3()
self.att.header = Header()
self.att.header.frame_id = "base_footprint"
self.att.orientation = Quaternion(*quaternion_from_euler(0, -0.1,
0))
self.att.thrust = 0.6
self.att.type_mask = 7 # ignore body rate
while not rospy.is_shutdown():
self.att.header.stamp = rospy.Time.now()
self.att_setpoint_pub.publish(self.att)
try: # prevent garbage in console output when thread is killed
rate.sleep()
except rospy.ROSInterruptException:
pass
#
# Test method
#
def test_attctl(self):
self.send_loc_init()
"""Test offboard attitude control"""
# boundary to cross
boundary_x = 5
boundary_y = -5
boundary_z = -10
# make sure the simulation is ready to start the mission
self.wait_for_topics(60)
self.wait_for_landed_state(mavutil.mavlink.MAV_LANDED_STATE_ON_GROUND,
10, -1)
self.log_topic_vars()
self.set_mode("OFFBOARD", 5)
self.set_arm(True, 5)
rospy.loginfo("run mission")
rospy.loginfo("attempting to cross boundary | x: {0}, y: {1}, z: {2}".
format(boundary_x, boundary_y, boundary_z))
# does it cross expected boundaries in 'timeout' seconds?
timeout = 300 # (int) seconds
loop_freq = 2 # Hz
rate = rospy.Rate(loop_freq)
crossed = False
for i in xrange(timeout * loop_freq):
if (self.local_position.pose.position.x > boundary_x and
self.local_position.pose.position.y > boundary_y and
self.local_position.pose.position.z > boundary_z):
rospy.loginfo("boundary crossed | seconds: {0} of {1}".format(
i / loop_freq, timeout))
crossed = True
break
try:
rate.sleep()
except rospy.ROSException as e:
self.fail(e)
self.assertTrue(crossed, (
"took too long to cross boundaries | current position x: {0:.2f}, y: {1:.2f}, z: {2:.2f} | timeout(seconds): {3}".
format(self.local_position.pose.position.x,
self.local_position.pose.position.y,
self.local_position.pose.position.z, timeout)))
self.set_mode("AUTO.LAND", 5)
self.wait_for_landed_state(mavutil.mavlink.MAV_LANDED_STATE_ON_GROUND,
90, 0)
self.set_arm(False, 5)
if name == ‘main’:
import rostest
rospy.init_node(‘test_node’, anonymous=True)
rostest.rosrun(PKG, 'mavros_offboard_attctl_test',
MavrosOffboardAttctlTest)