Hello. I am trying to setup collision prevention using distance information from ultrasonic sensors. I have a flight management unit (FMU) running PX4 and a microcontroller sending MAVLink messages to the FMU.
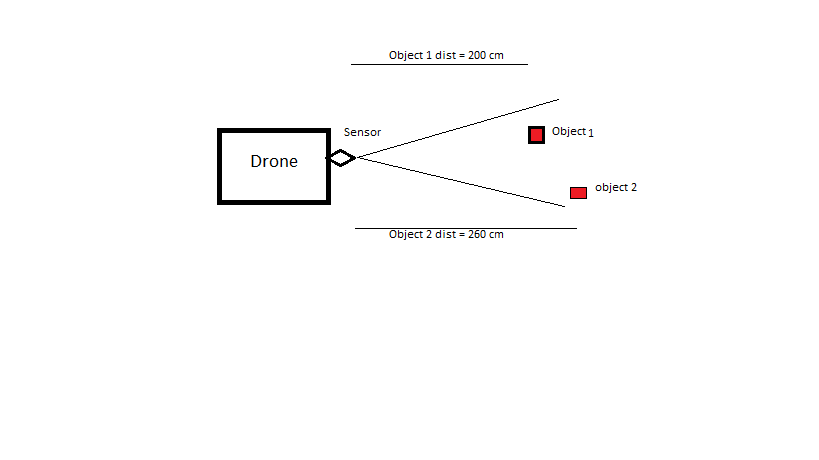
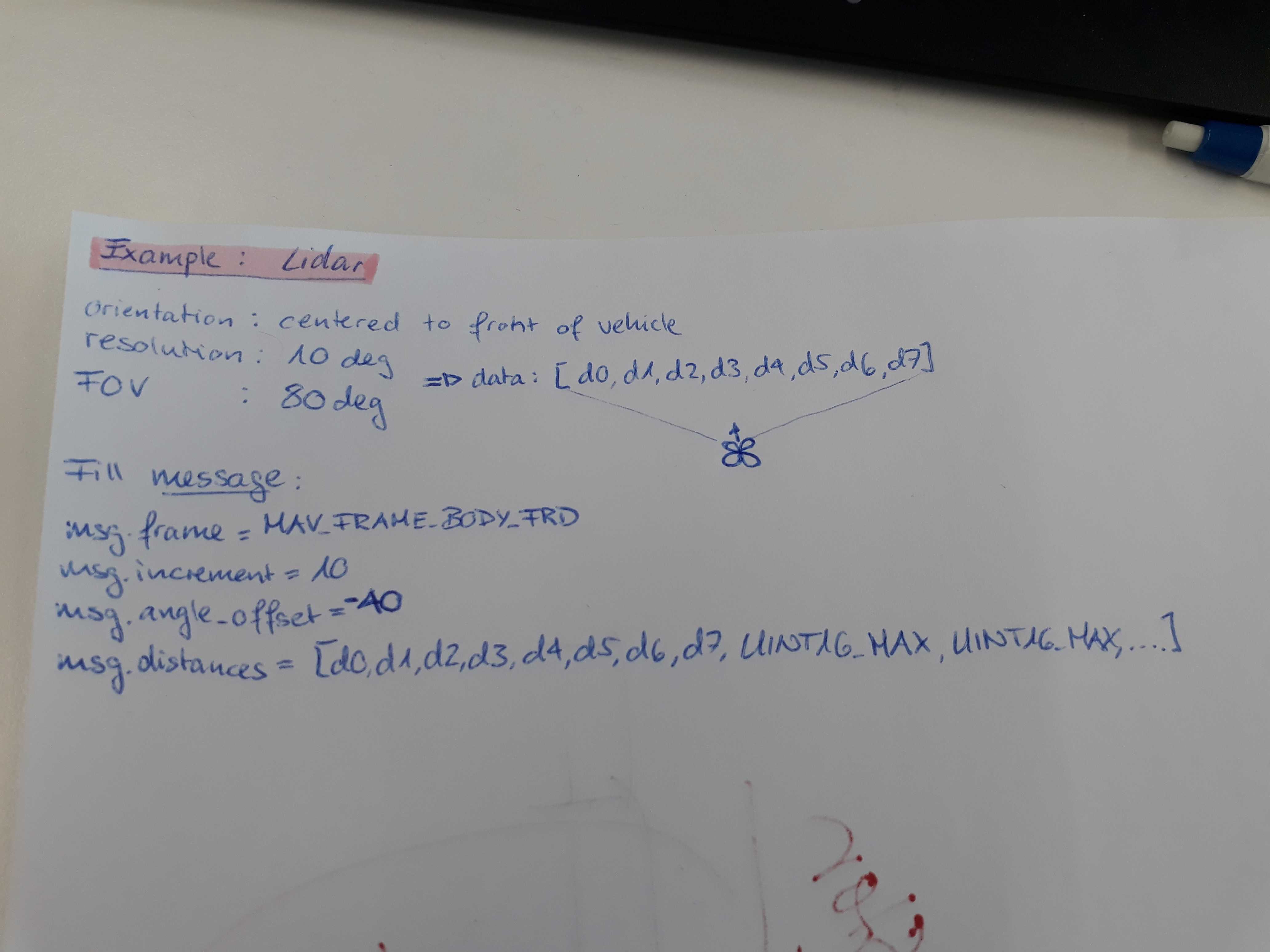
I’ve got a question regarding how I should fill the OBSTACLE_DISTANCE message. I have 6 ultrasonic sensors, and I plan to distribute them evenly around the drone. So I assume increment should be 60. I notice that the array distances is of size 72 but I only have 6 sensors. If I put the measurements from ultrasonic sensors in the first 6 elements, what values should I assign to the rest? Would PX4 firmware only consider the first 6 elements of the array and ignore the rest?
Any help will be appreciated.