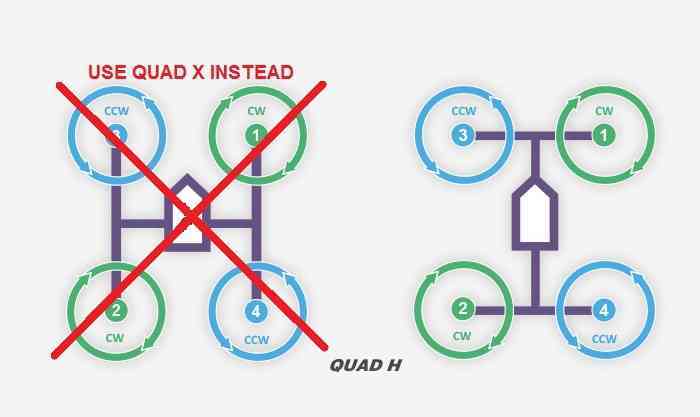
It should be X. The name H frame is ill chosen. It would only apply for a frame layout like an H on it’s side.
See this image: http://discuss.ardupilot.org/uploads/default/original/2X/3/374631d1fc12eabbe7bbb8e97bd68628295f3163.jpg
It should be X. The name H frame is ill chosen. It would only apply for a frame layout like an H on it’s side.
See this image: http://discuss.ardupilot.org/uploads/default/original/2X/3/374631d1fc12eabbe7bbb8e97bd68628295f3163.jpg
@sanderux (or others) what type of flight times are you getting with your ranger vtol? Curious to know how much efficiency is lost.
Thanks
It has been quite some time since i flew the quadranger so i couldnt say for sure. There are most likely some logs floating around where you can check the wattage.
Generally no flying range/time is lost on a VTOL for the following reasons:
All the factors above make that, in general, a vtol can perform on par or even better when purely looking at range.
Hola He construido un quadranger, con una px4 y lo he configurado con qgroundcontrol. Pero no me funcionan los servos, el motor del avion, si arma en AUX 5.
Me puede ayudar alguien.
Gracias
{kind=link}