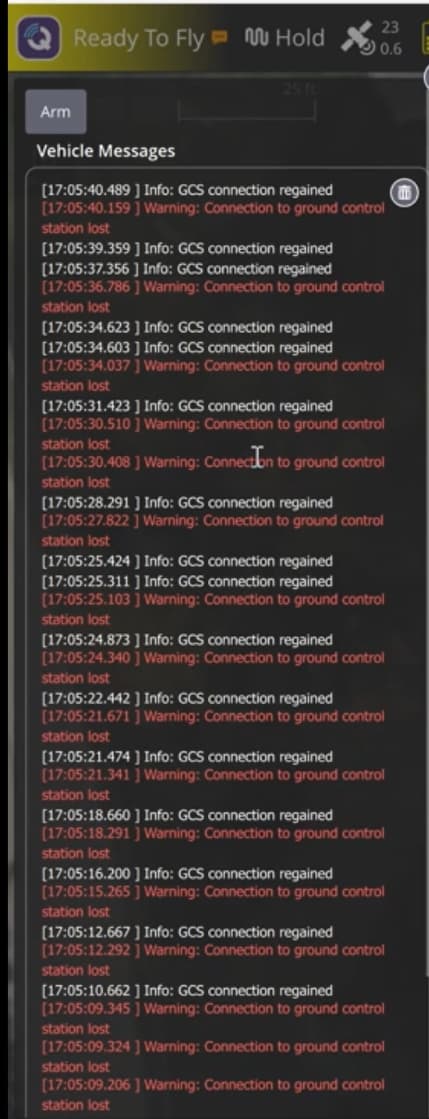
When I connect more than 3 PX4 vehicles to QGroundControl, some start rapidly flipping between Ready and Not Ready with repeated “connection lost/regained” messages. It’s not always the same vehicles, but a few from the group. Limiting failsafe behavior by setting COM_DLL_EXCEPT reduced the visible flicker, but I’m not sure that’s actually safe or addressing the root cause.
I was considering increasing COM_DL_LOSS_T, but I’m unsure whether that just delays the inevitable failsafe or if it helps during the initial connect phase when multiple vehicles come online together.
Setup (high level):
-
PX4 (multiple airframes), unique
MAV_SYS_IDs -
Wi-Fi UDP to QGC, default autoconnect (14550)
-
3 simultaneous vehicles triggers the issue; ≤3 is stable
Questions:
-
Is there a recommended upper limit for simultaneous QGC vehicles on one GCS/port?
-
Would raising
COM_DL_LOSS_Tmeaningfully help during connect bursts, or just mask real link drops? -
Any best practices for multi-vehicle UDP (e.g., unicast to unique ports per vehicle and adding QGC Comm Links vs. all on 14550 broadcast)?
-
Guidance on stream rate tuning to keep QGC responsive (PX4
MAV_x_RATE, SRx rates) for multi-vehicle? -
Any known QGC settings that reduce UI/heartbeat thrash with many vehicles?