Just to make sure everyone’s on the same page; I’m doing this on the bench during initial setup. It does audio call out “Reject Hold” when I choose the Loiter switch.
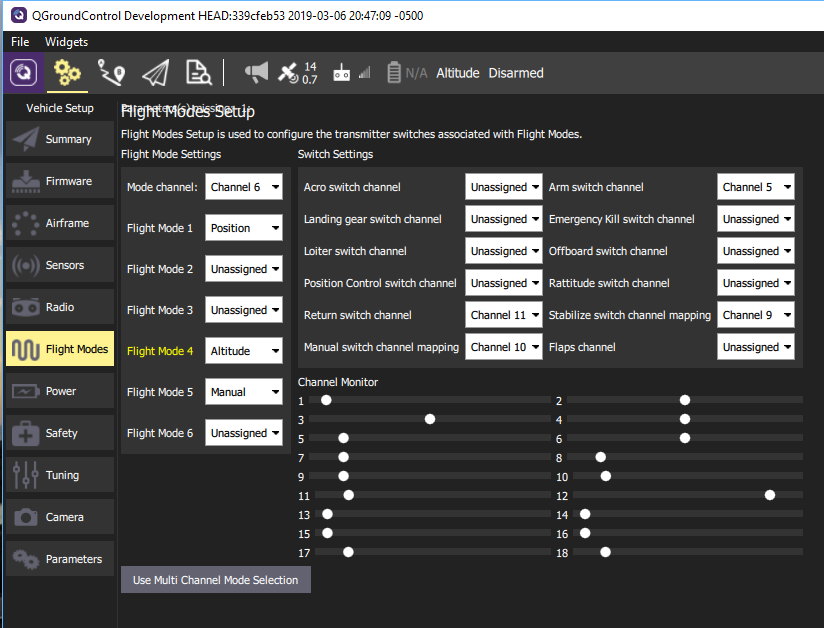
Humor me once. Change your flight mode setup where you have one channel on a 3-way switch then assign other flight modes to other 2-way or 3-way switches from other channels. As my example below, CH6 is on a 3-way that has Position, Altitude and Manual, CH9 on a 2-way as Stabilize; using, as you suggested, a QGC Daily Build.
When I switch CH6 to Altitude, QGC will audio call out “Altitude” and display it by the icon bar.
When I activate CH9 switch, I’m presuming it switched to Stabilize but have no confirmation since it didn’t make an audio call out on the flight mode and doesn’t show the change on the icon bar:

As @DonLakeFlyer indicated, this is a firmware issue, not a QGC one.
If you look at post #6, when I changed the airframe to a VTOL, the audio call out and icon bar display is correct, per the switch activation of CH9. And for good measure, I also upgraded to v1.8.2 Stable on the VTOL and it was working as well.
Thanks.