Dear all,
I am working on indoor small drone where GPS is not allowed. I have followed the tutorials on Px4 documentations in connecting the PX4Flow to Pixhawk. Here is what I have done:
- From list of options for Firmware in QGC, I flashed Pixhawk using Master in QGC.
- I downloaded github directory containing Px4Flow files: GitHub - PX4/PX4-Flow: Firmware for PX4FLOW board
- I flashed the downloaded files and flashed it using this instructions:
https://pixhawk.org/dev/px4flow
I connected Px4Flow to Pixhawk as follows:
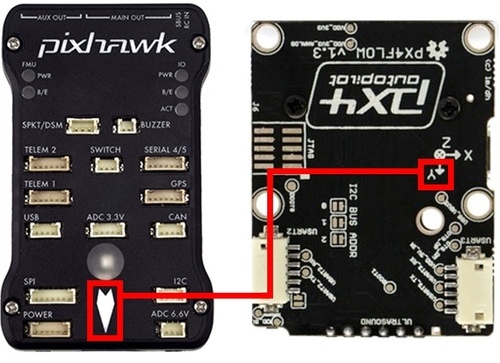 <img
<img
I noticed that the SENS_FLOW_ROT is set to 270 degrees in QGC but the documentation says make it 0 degrees based on this:
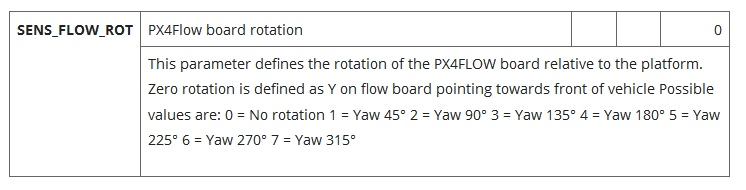
So I set the SENS_FLOW_ROT to 0 degrees using the documentation
I set the SYS_MC_EST_GROUP to EKF2 and the POS_CTRL mode was bad. It did not stay hovering.
I would like to tried LPE with the community suggestion. I did not have stable hover before, but since I have just flashed these codes for Pixhawk and Px4Flow using masters I feel that I am doing that part correct. @andre-nguyen suggested me to check for orientation. Could someone assist me with getting this setup to work using LPE in POS_CTRL mode. I would really appreciate if I could get a stable hover like so: LPE indoor position control mode with px4flow - YouTube
Thank you