PX4 Sync / Q&A: April 23, 2025
Dronecode Calendar
Agenda
- Announcements
- Future Events
- Flight Testing Update
- Release Discussion
- Bug Report / Q&A
Announcements
No announcements today.
Next Dronecode Meetup
Nothing scheduled yet.
Future Events
- ICUAS May 14-17, Charlotte, USA
- ROSCon 2025 Singapore: ROSCon 2025
Flight Testing Update
The team at Ascend Engineering (Chicago). are running flight testing for the community.
How to reach out to the team
- GitHub: Tag user @PX4/testflights
- Discord: #flight-testing
- Weekly on the PX4 Dev Call
How to Request Testing (GitHub)
- Write down the steps to test your issue/pull request
- Make sure to note the risk involved in flying
- Write down things to look out for / anticipate - eg: “we are looking for no yaw jumps”
- Add issue/pull request to the Flight Testing project board
- Make sure to specify any hardware/software requirements as much as possible
Resources:
Comments / Discussion:
- Issues:
- Tested:
- Fixed Wing / VTOL:
- QGC Build: Stable
Release Discussion / Updates
v1.16 Release Discussion
We are going to reset the release branch, to bring in critical fixes that went into main, and then tag a new beta. We are still chasing a few blockers tracked on the project board. The flight test team will continue to test the latest v1.16 beta.
If anyone has any critical fixes please add them to the project board.
-
Fixed Wing known blockers:
-
Multi Copter known blockers:
-
Rover Blockers:
-
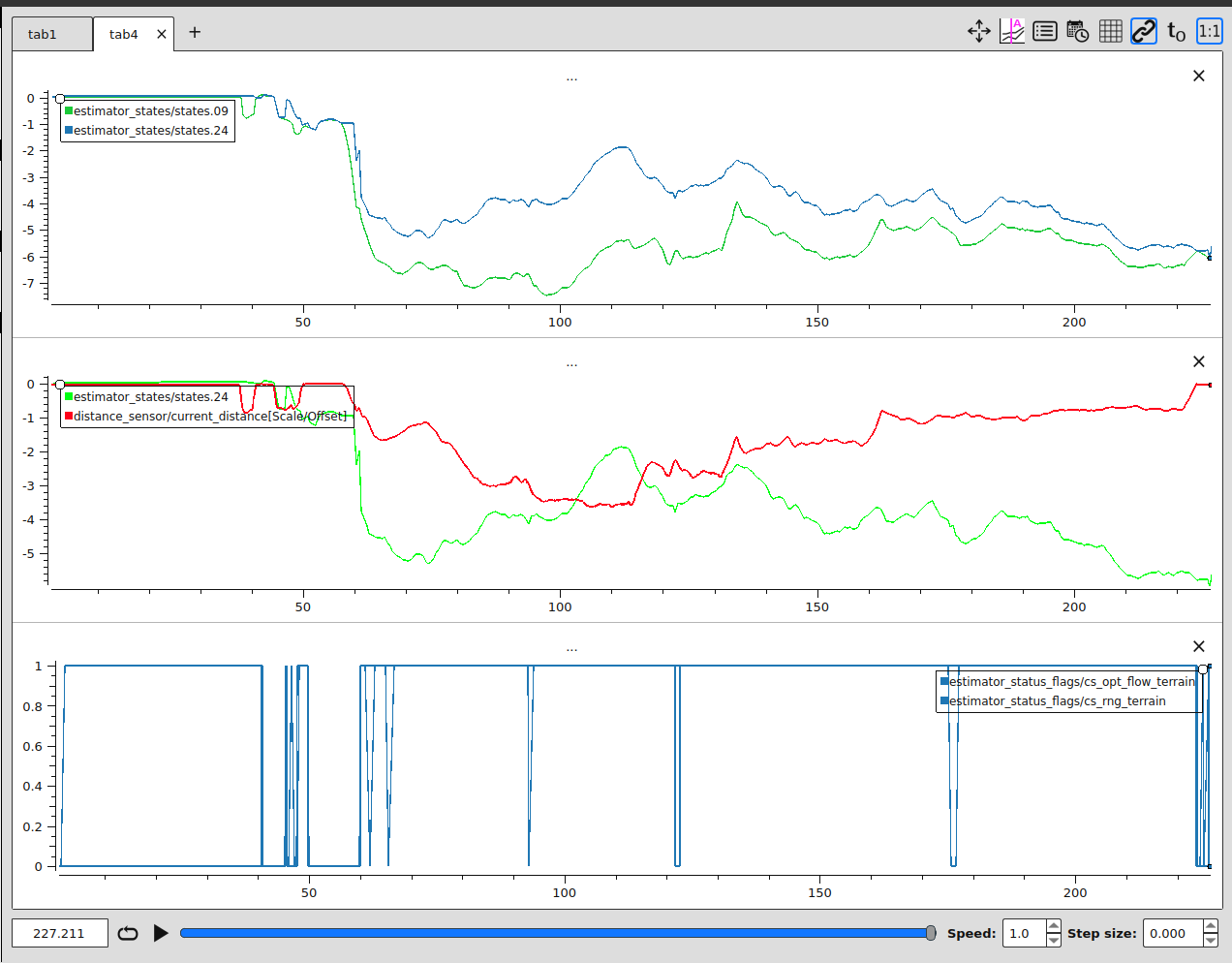
Optical Flow:
-
Simulation known blockers:
Resources
Bug report / Q&A
1- Question regarding metadata updates on documentation:
When docs where hosted on its own repo we had an autocommit bot that moved metadata between repos. Now that we are all-in place, we need to work on a non-intrusive way to make this happen.
It was discussed that we do the following:
- Have a test that fails when missing metadata updates. Also warns users this happened and gives instructions on what to do.
- Create a script that can be run locally that makes the changes
2- @dakejahl thread reply to be discussed!