Hi. I’m newbie about ROS2.
Here is my configuration
WSL2 Ubuntu on Windows 11
ROS2 Humble
PX4 v1.13.2
Fast-DDS v2.9.0
Fast-DDS-Gen v1.0.4
And followed this procedure.
ROS 2 User Guide (PX4-ROS 2 Bridge) | PX4 User Guide
I think ROS2 works good.
Ubuntu (Debian) — ROS 2 Documentation: Humble documentation
First problem is,
I couldn’t find “micrortps_agent”. My procedure was good. None of any errors. So I googled and found this in “PX4-Autopilot/build/px4_sitl_rtps/src/modules/micrortps_bridge/micrortps_agent”. So make && make install.
Second problem is,
and
but

and
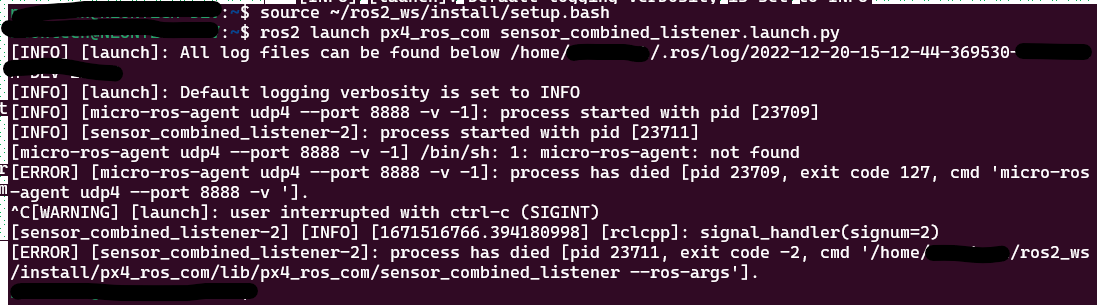
What is “micro-ros-agent”? I couldn’t find this in that document (I mean PX4 + ROS2).
I moved msg files “PX4-Autopilot/msg” to “px4_msgs/msg” using “PX4-Autopilot/msg/uorb_to_ros_msgs.py”.
Would you let me know what should I do next step?