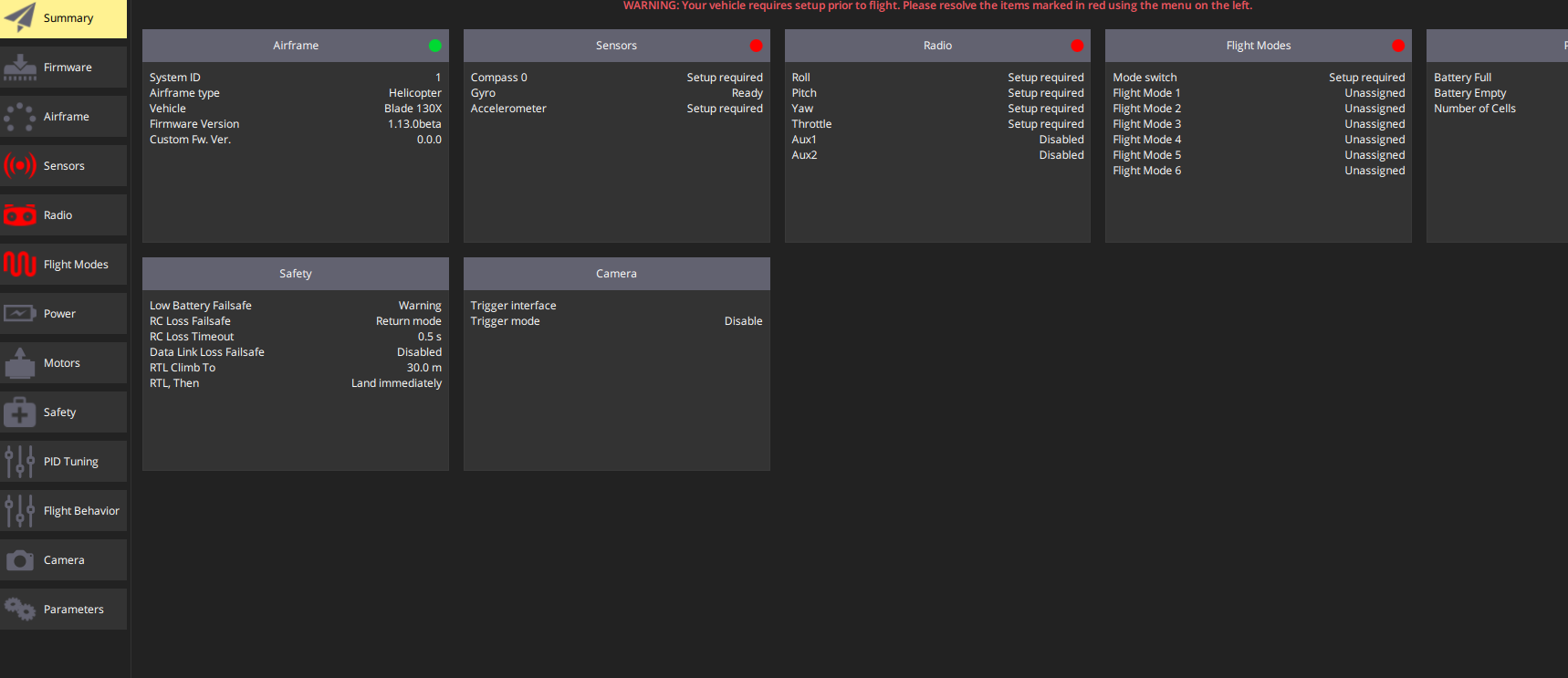
GCS is QGC, firmware is PX4 latest.
I set the frame type to heli.
I think it was BLADE 130X from memory.
APM and MP have dedicated settings screens for helicopters.
Does QGC have such a setting window?
I don’t see anyone setting up a traditional helicopter with the PX4.
Is there a reason to write about helicopters on the PX4 forum?
@maphering I believe there has been some recent work on getting helicopters to work using the new control allocation. (which was part of the discussion of the dev call this wednesday)
If you have any problems while setting up a traditional heli platform with PX4, it would be great if you can share them
What I’m curious about is this.
-
UI is not provided when setting to QGC with px4 firmware uploaded
-
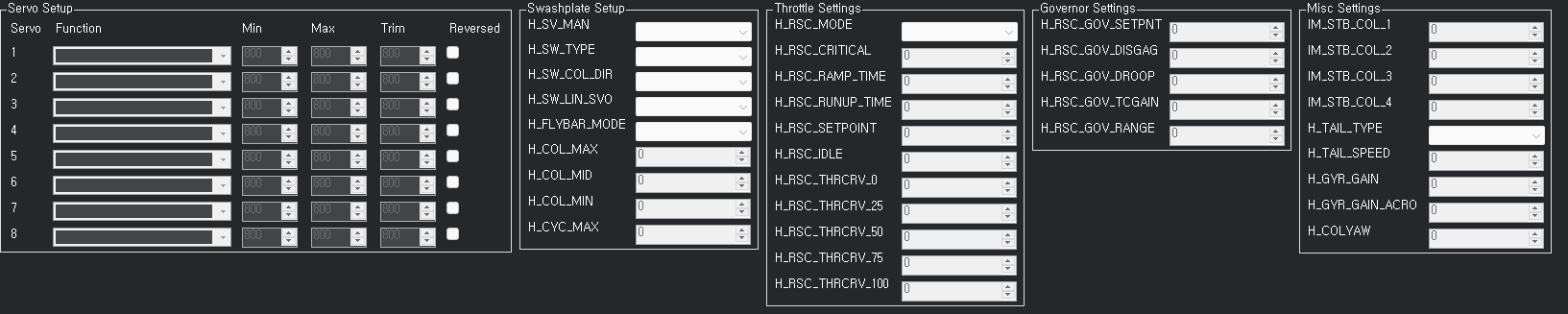
I need a setting page like MP. my QGC doesn’t have this
-
Does QGC work well without any problems even with the APM firmware up?
I want to set up a helicopter using the PX4 firmware.
It would be difficult if there is no setting page like APM & MP.
It would be difficult if there is no setting page like APM & MP.
@maphering Is this just about the UI? or about the control scheme in general? If it is an issue regarding the UI, I don’t think QGroundControl uses vehicle type specific user interfaces.
If this is regarding how control for helicopters are handled, this is probably because ardupilot handles helicopter related settings (such as rotor and swashplate types) more explicitly.
Probably @bkueng or @MaEtUgR might explain how to get a helicopter up and running better