April 6, 2022
Join us
Agenda
- Community Announcement
- Community Q&A
- Project Updates
- General Discussions
- High priority queue
- Release
Moderation
- Community Q&A : Maximum 3 - 5 min limit for each question. If the discussion isn’t finished, ask the Questioner to create a Github Issue about it and continue discussion there.
- Limit discussions to maximum 5 min, then it should be continued in In-Depth discussions.
- Always consider the perspective of community members who may not have a deep understanding on certain concepts
 Community Announcement
Community Announcement
PX4 Dev Summit 2022 CFP Deadline in 2 weeks!!!
- CFP Closes: April 19th
- CFP Notifications: Week of May 2nd
>>Apply to the CFP on our Website<<
 Community Q&A
Community Q&A
Raise your quetions!
What happens to old logs when SD card gets full? by Charles Cross
Couldn’t find an answer in the user guide - what happens when an SD card fills up from logging for a long period of time? Do old logs get rolled over, or does everything just stop? (edited)
- At 300 MB limit, would it not log?
- There are cases where customers can be logging for days in a row.
PX4 linking with Matlab Simulink? by AI
Any one link Px4 with matlab simulink ?
Home position shifting around & confusion - @junwoo0914
I found it confusing that home position can move around & be non-zero (not at origin). As well as the exact definition of when and how local position coordinate gets defined. Is there a good documentation on this? If not, I would like to create it, so could anyone share some thoughts / experiences on this?
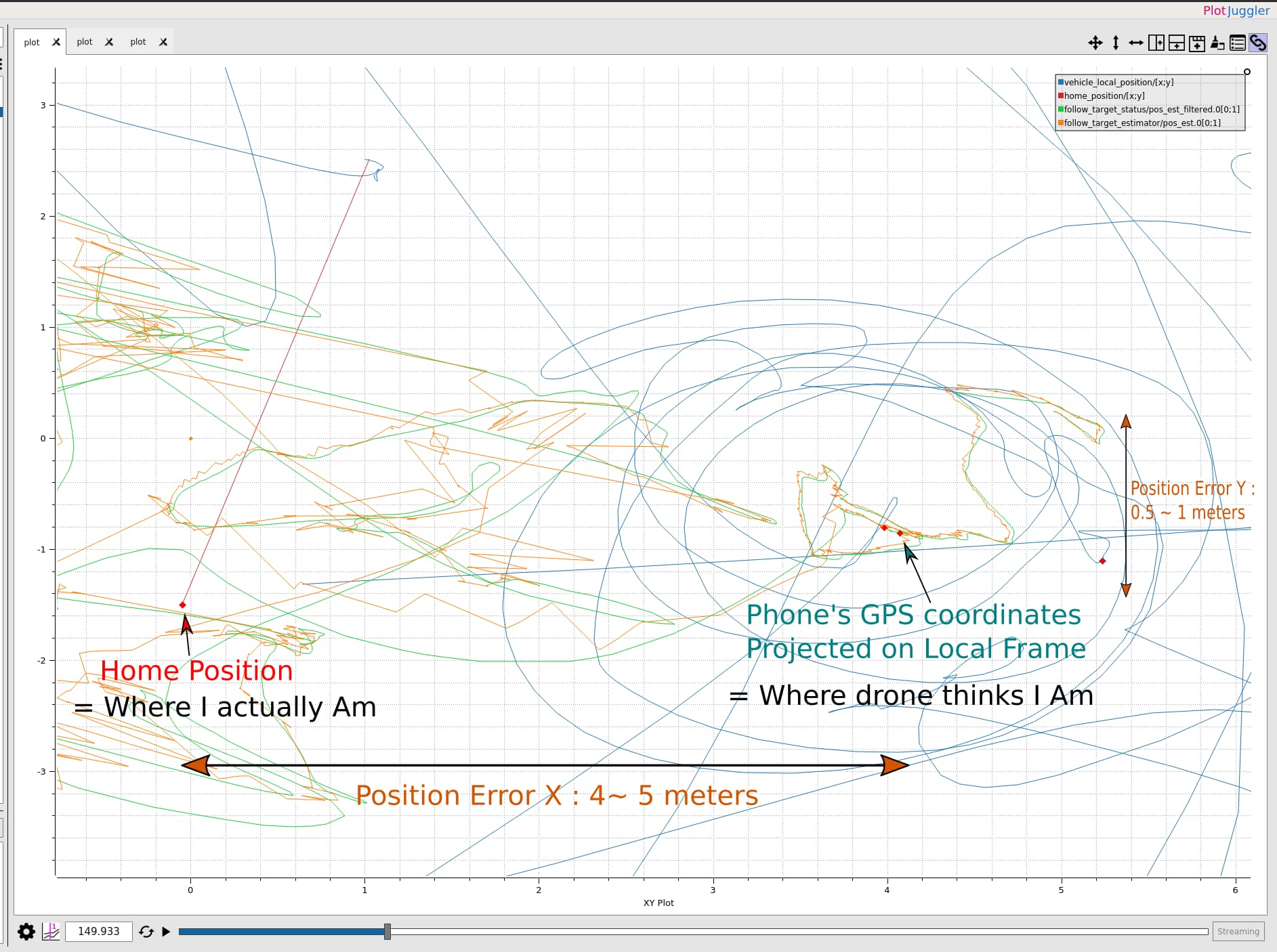
- Why & When does home position get shifted around?
- Share the flight log. @junwoo0914
- There is yaw reset logic. Need to investigate.
 Project Updates
Project Updates
Updates from the team
- Robustify the SBUS parsing against problematic input data:
QGC Firmware Update tab improvements + Adding reboot button for setup pages - @junwoo0914
- Previously it was quite tedious to unplug & re-plug the USB cable to update a new firmware.
- This PR adds the ‘reboot button’ and encourages users on Firmware Update page to use reboot button instead of physically unplugging.
Control Allocation Improvements Initiative
TODOs and Discussions here :
 General Discussions
General Discussions
Sensor calibration improvements - @junwoo0914
-
Magnetometer rotation isn’t relative to the Board’s orientation, but rather it’s an absolute rotation compared to body FRD frame, isn’t this confusing for the users?
-
Can we unify mag & accelerometer calibration? How?
-
Auto Mag rotation detection doesn’t return a correct value (after calibration, the magnetometer value doesn’t make sense) - Charles
-
@dagar : Auto Mag Rotation Detection depends on ‘internal magnetometer’. So it doesn’t work without an internal mag!
-
@david_s5 : Can we have prioritization of certain mag models over another?
- Tough to say, since mag location and external factors matter as well.
 DEV CALL LAST WEEK
DEV CALL LAST WEEK
Coding style suggestion by @tstastny
- Is it getting obeyed in PX4 Codebase?
QGC User Interface is bad for developers by @junwoo0914
- Suggested a developer mode via issue.
- We can expose the setup pages on the main QGC screen (to remove extra click on QGC icon)
- What do PX4 Developers need in QGC?
-
Who takes care of QGC?
 SLACK LAST WEEK
SLACK LAST WEEK
Offboard Control on only Z position not supported in Commander Module by Charles Cross
In this scenario, if offboard is only trying to perform altitude hold, there is no way to say “I want to control position, but only check validity for z”, since the
offboard_control_modemessage does not have an “altitude” flag or any other method of telling commander what to perform checks for.
- Currently resolved in the private codebase, not general for upstream support.
Fixed Wing land mode discussion by @ryanjAA
I asked this awhile ago and @dagar gave some good insight but what is the status on 1) knowing what happens when a FW goes into land mode with use terrain enabled and an accurate altitude sensor is present (i.e. a lidar) and 2) how can this be tested in gazebo to verify. It has always been the assumption that it will crash into the ground because of the text here https://docs.px4.io/master/en/flight_modes/land.html#fixed-wing-fw so has been avoided entirely. Also, after getting some clarity I would like to change the docs to reflect what will occur.
Control Allocation Servo direction confusion by Chris Seto
If the flight control polarity is set by the “left/right” choice for ailerons, shouldn’t the roll torque scaler be always positive?
- Control Surface definition may not be clear to the users, the doc will be improved : @junwoo0914
Babyshark VTOL pusher propeller started spinning right after safety switch was pressed
We recently had an issue where our pusher propeller started spinning as soon as the safety switch was pressed. There is no log file, which indicates that the drone was not armed. Since servos are powered during prearm mode, one of my theories is that the wrong mixer configuration was loaded and the pusher motor was treated as a servo. We have not been able to reproduce the issue though, and I don’t see how the mixer configuration could change from one boot to another.
We use PX4 1.12.3 on a Cube Orange with a BabyShark VTOL airframe. Any theories or tips for where to look while troubleshooting would be greatly appreciated.
 GITHUB LAST WEEK
GITHUB LAST WEEK
 High priority queue
High priority queue
Discussion based on board: https://github.com/orgs/PX4/projects/24