Hi,
I’m trying to Simulate the experiments I have done with the current px4 controller. However, I don’t understand some parts of the controller.
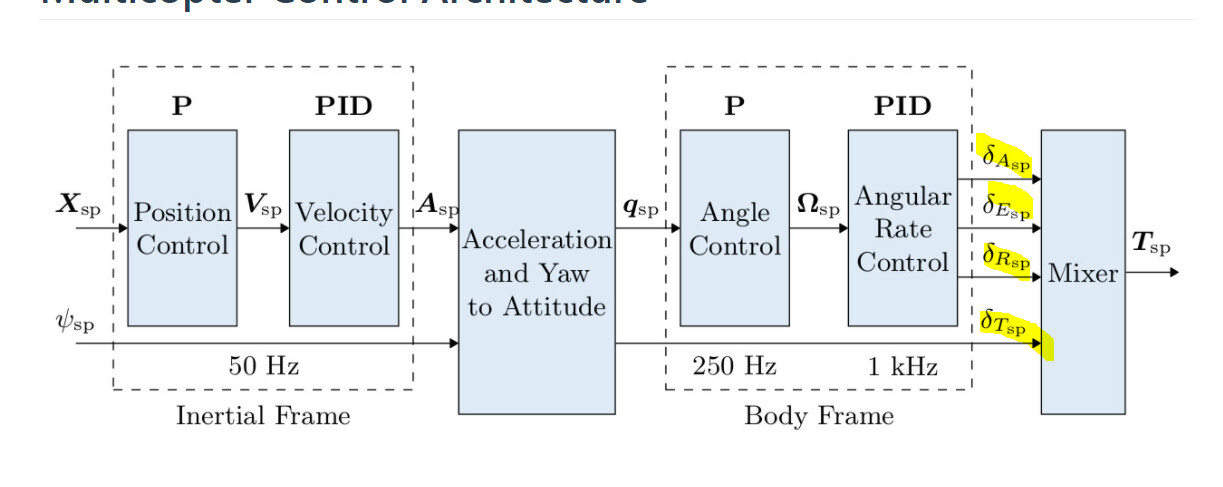
Considering the px4 controller architecture,
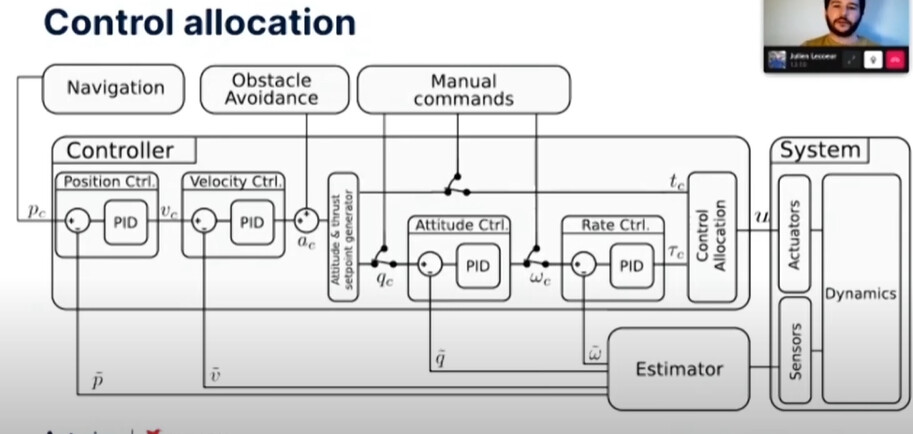
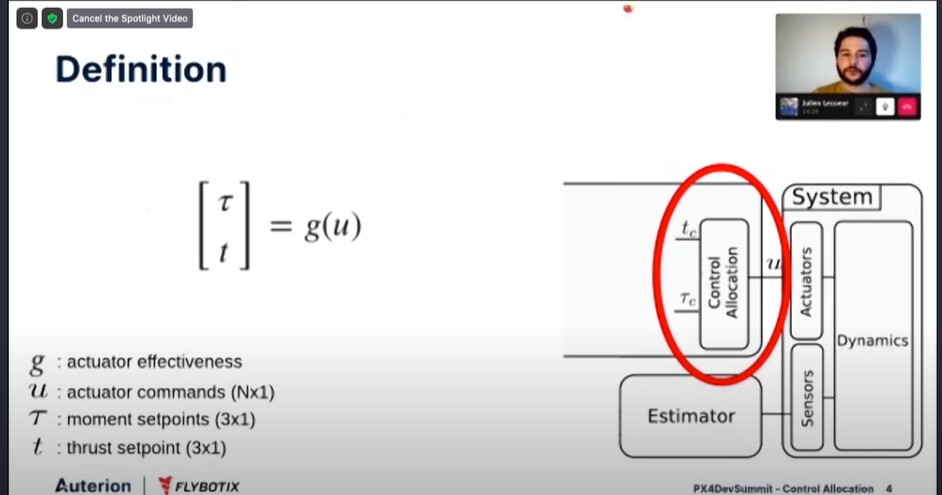
and considering this video on Youtube,

and based on the ETH attitued controller paper, Nonlinear Quadrocopter Attitude Control - Research Collection

My first question is, is it right to say {delta}T{sp} = (coll_cmd - norm(current acceleration))/g*MPC_THR_HOVER
Then we have the {delta}T{sp} , {delta}A{sp} , {delta}E{sp} , {delta}R{sp} .
These values are something between -1 and 1 (for {delta}A{sp} , {delta}E{sp} , {delta}R{sp}) and between 0 and 1 for the {delta}T{sp}.
Now focusing on the Mixer block,
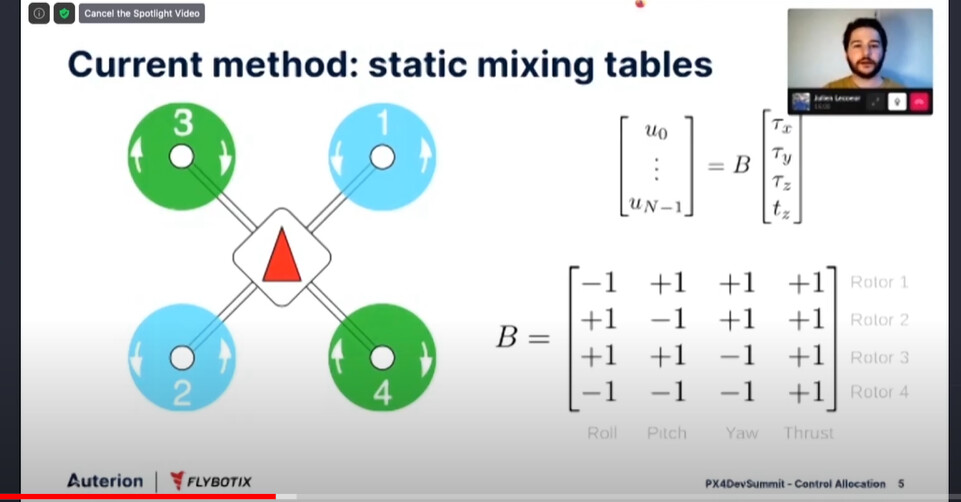
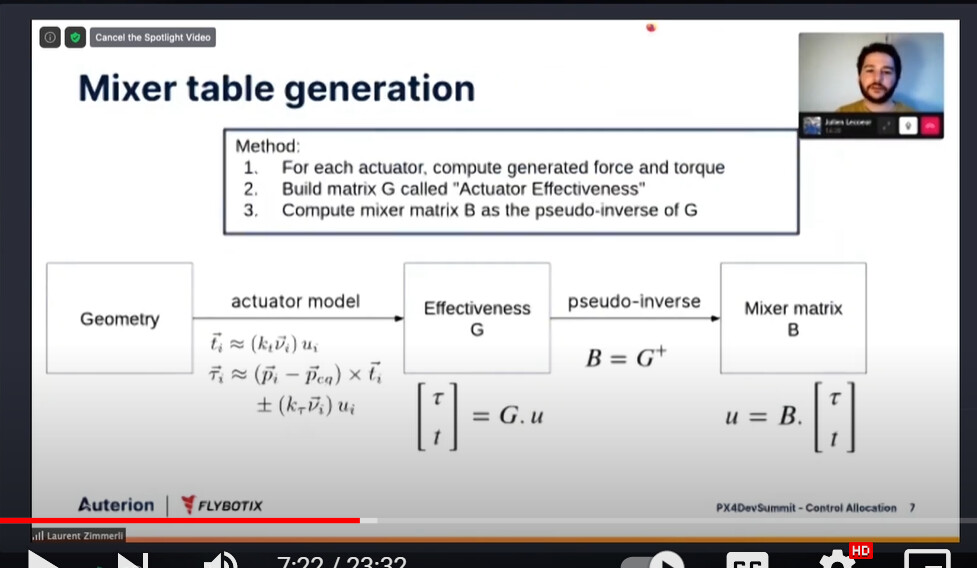
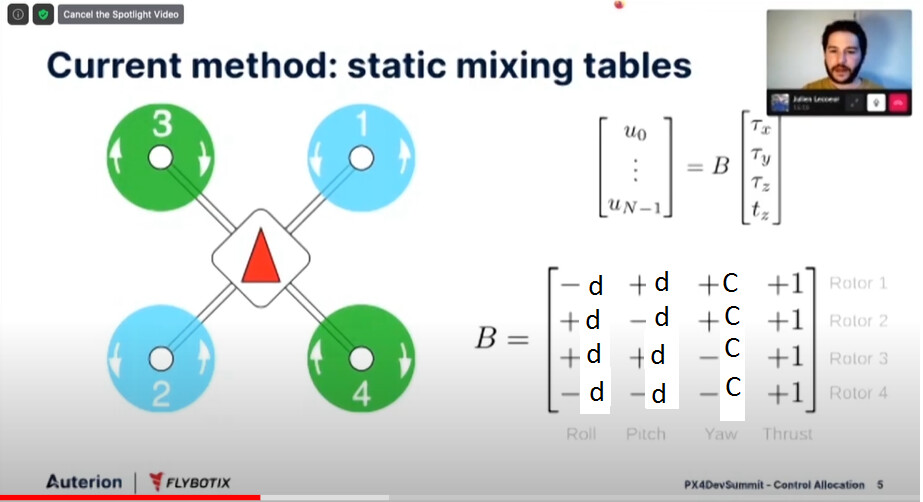
In the Youtube video it is said that we know the B, By using the distances our motors have relative to the CG, and also knowing the induced body z direction torque relation to the induced forces of the motors (C coefficient) . If we consider the distance to be d, then B would be
Ok, now we have its inverse to calculate t and \tau from u. But we don’t have the u. We have the \delta values. How we can calculate this u using the \delta values then?