I am changing the autopilot to control the same vehicle during a flight on Gazebo. All the PX4 instances are connected to the QGC and Gazebo throughout a middle software.
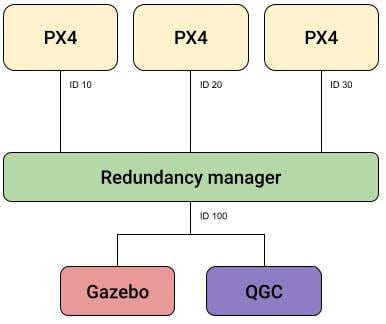
I have done experiences and the software seems to work fine with any of the three PX4 instance, all receiving commands from the QGC. But when I try to change during a flight the vehicle ignores. Why does Gazebo ignore other autopilot commands?