Hello all,
I want to use the PX4 avoidance with AirSim. The PX4-Avoidance repository is for Gazebo and I used the px4_avoidance_airsim repository as well which seems to be for AirSim, how ever I get errors and I am not sure about the exact JSON I need to use for.
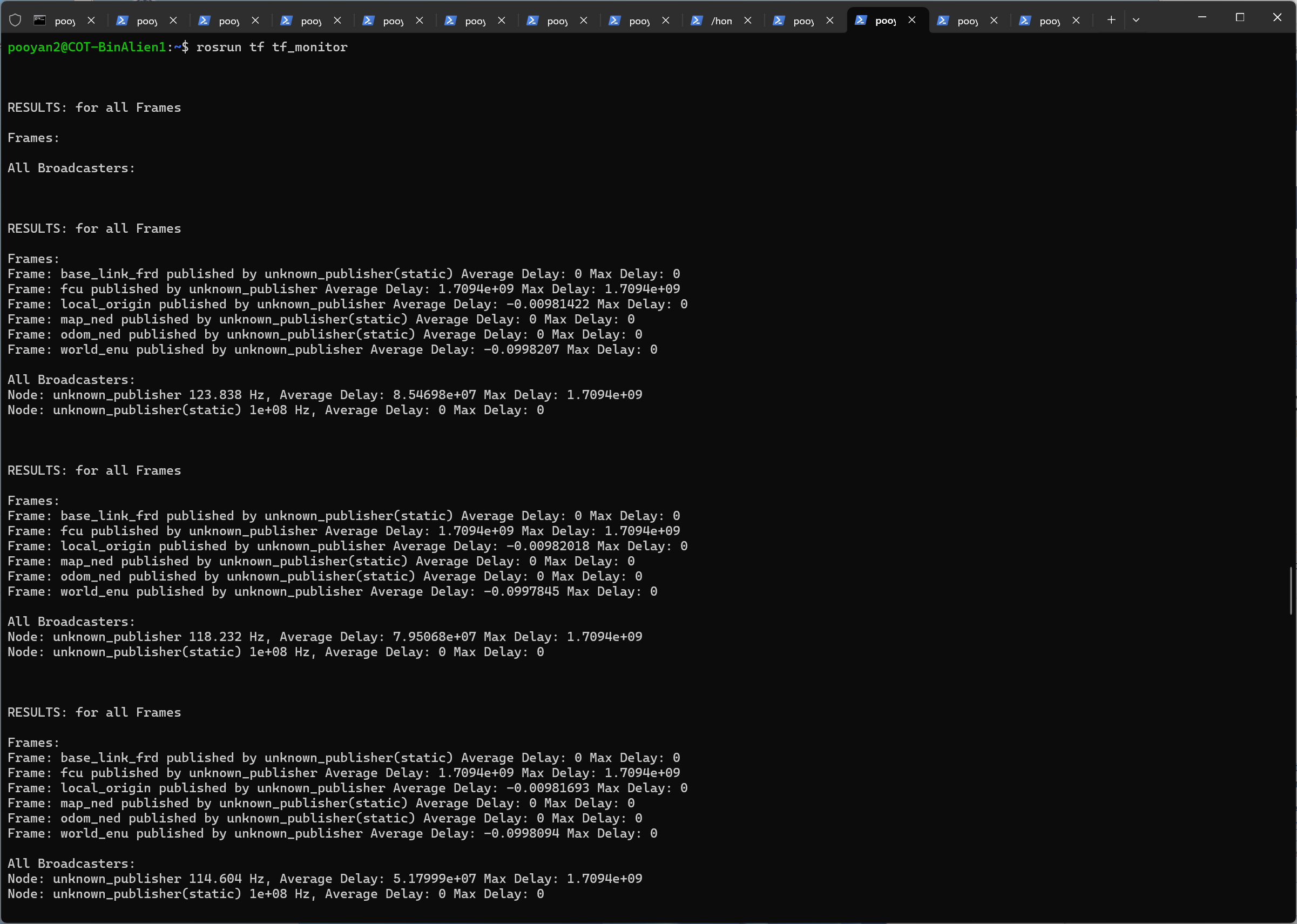
For the “roslaunch px4_avoidance_airsim start_simulation.launch” (it should be simulator as the file name is different) I get a TF error:
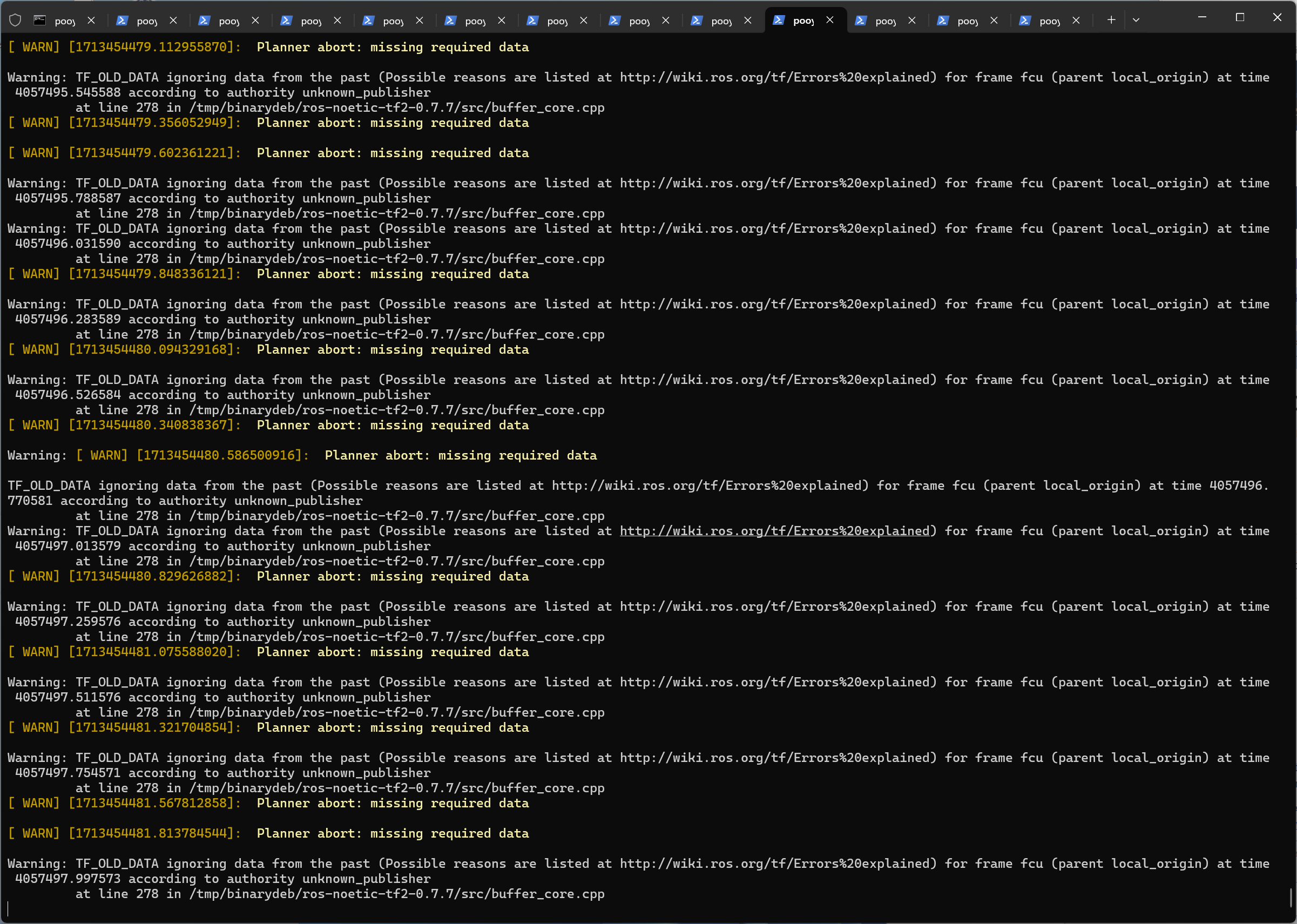
For the other command “roslaunch px4_avoidance_airsim start_px4_avoidance.launch”, I get an error saying “Planner abort: missing required data” as soon as I take off. I still can’t turn on the obstacle avoidance in QGC as well.
I would appreciate it if anyone has any experience in editing the PX4-Avoidance repository to use the AirSim except Gazebo, or if you know what can I do for the px4_avoidance_airsim errors.
Thank you.