Hello,
I am currently working on a project where I am aiming at having an autonomous flight with a RC paraglider.
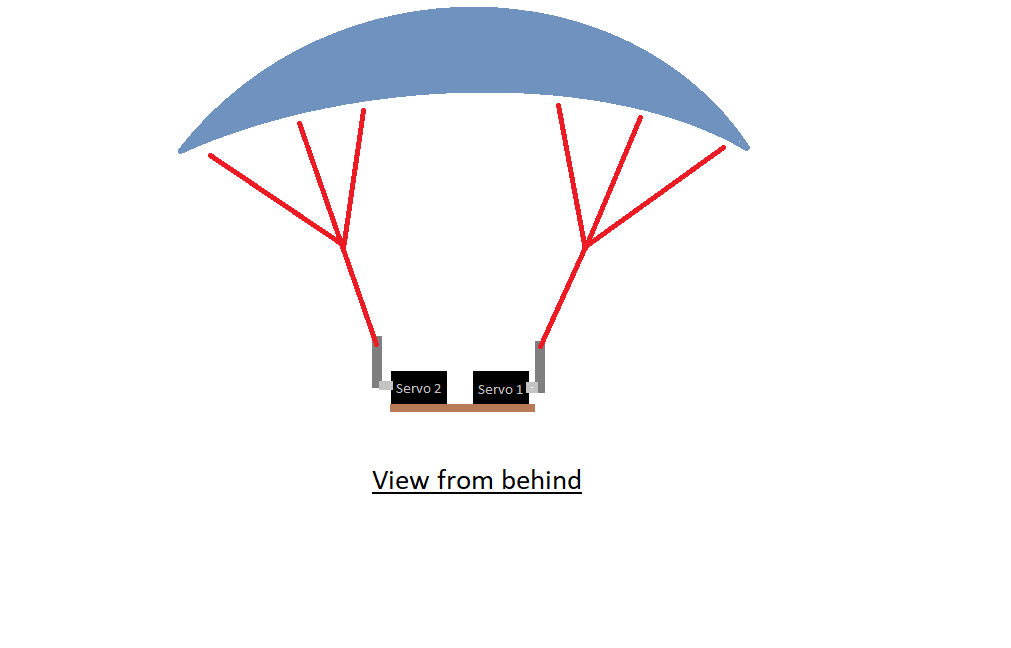
Controls of a paraglider are really simple, pull on a string (Servo 1) to go right, pull on another to go left (Servo 2). No need for stabilization since a paraglider is inherently stable. So the only commands I need are “Turn left/right”.
I don’t have much experience with the Pixhawk and coding so please forgive me if I am missing something obvious.
I couldn’t find an airframe or firmware for what I need, so I tried to understand and change the code for it to work but without sucess.
I guess I need a steering output like in the Rover Firmware.
My problem is :
I haven’t found a way to translate the turn command to a servo, (not roll, pitch, yaw). I have looked at mixing files but haven’t understood them enough to make successful changes.
The stabilization can be turned off since it will only create parasite movements, but I don’t know how.
Any help would be really really nice !
I have been stuck for a few weeks now.
Thank you for your answer Julian.
How would you suggest I change the mixing files ?
Because in mixing files I cannot find a way to set a servo output to turn. I only see Pitch Roll Yaw…