Hi,
I want to implement a path tracking with VTOL FW mode in offboard mode I have a set of 350 Local points(x,y,z) that describe the path and I want to pass it to the autopilot to track the smooth path.
I tried offboard Setpoint with MAVSDK in SITL but from the observed behavior I think that a position set point for FW would mean a loiter point not as a way point to go through (similar to in mission mode).
-
I want to make sure if I understand this in the right way as If I want to implement the whole path I’d need a feedback from telemetry to transit to the next way point assuming that it will be applicable.
-
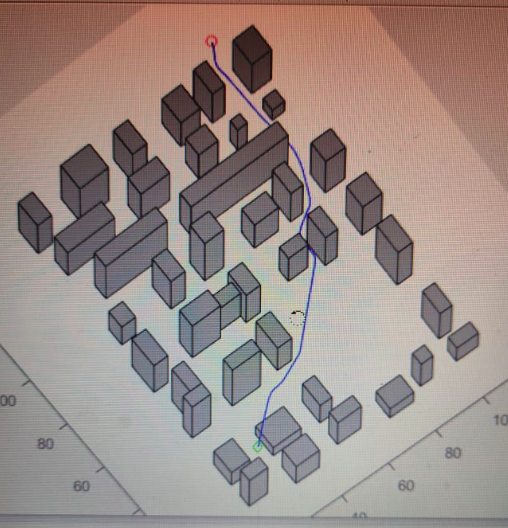
From my searching I couldn’t find resources for implementing a smooth obstacle avoidance path with FW in a simulation … All what I could find simulated is simple orbits. I’m not sure how the L1 Path follower controller really work ( I’m not expert in control at all ), but will it be actually able to follow a smooth trajectory like the one in the image or should I try to implement an external path following controller and send attitude set points to PX4. Is there any specific controller recommended?
I would really appreciate your advice on this issue as I think it’s somehow unimplemented before and it would be extremely exciting to get it done.