Hi. I’m trying to make my own driver to use an external sensor via SPI port.
I have already done, it works well.
However, I’d like to subscribe to some of the uORB topic, ‘actuator_armed’, to improve my external sensor data.
I spent 2 days to subscribe to this topic in my driver, but I failed.
I don’t know whether subscribing to the topic in my driver or not.
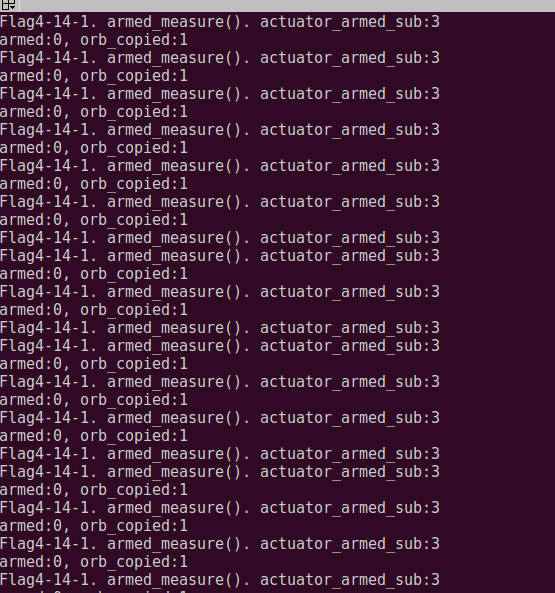
I’m using work_queue function to be available periodic polling, and orb_check is succeeded but orb_copy failed (It only give zero values).
Could you please let me know a few things to check?
I checked ‘actuator_armed’ topic was being published (by typing ‘listener actuator_armed’).
And I can also publish my sensor data using my driver even though it is not related to the problem of subscribing to topic I think. I tested it without publishing the sensor topic, and I failed.
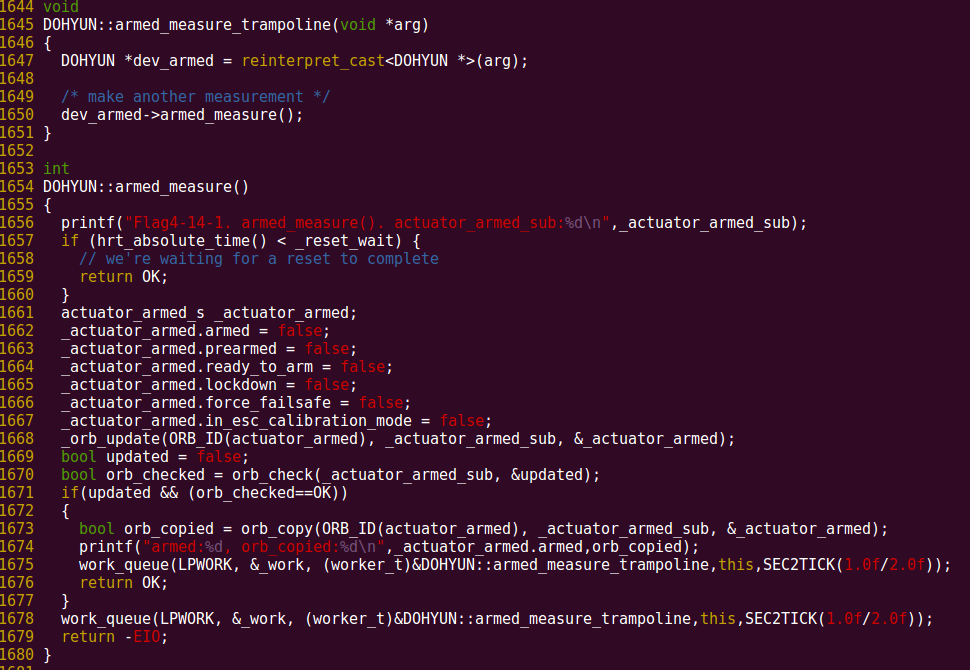
These are my code and result (using FTDI debug tool).
I’m sorry that I cannot show all of my code because it is very complicated.
The result of orb_copied should be ‘0’ when it succeeded.